In July 2015 we were surprised by the news that a robot kills factory worker after picking him up and crushing him against a metal plate at Volkswagen plant in Baunatal (Germany). They insisted the death was a result of human error and not any malfunction on the part of the robot. A Volkswagen spokesman stressed that “the robot was not one of the new generation of lightweight collaborative robots that work side-by-side with workers on the production line and forgo safety cages”.
The application of robots in industrial processes is widespread in industry (mainly automotive), where they perform a multitude of tasks, mostly sequential, repetitive and at high speed. Accidents caused by robots are highly unusual. Many robot accidents do not occur under normal operating conditions but, instead during programming, maintenance, repair, testing, setup, or adjustment. During many of these operations the operator, programmer, or corrective maintenance worker may temporarily be within the robot’s working envelope where unintended operations could result in injuries. During normal operation, robots are confined in safety cages precisely to prevent incidents in contact with humans.
Without adequate safety measures traditional industrial robots can cause serious accidents to people by crushing and trapping (occur when a worker’s limb or other body part can be trapped between a robot’s arm and other peripheral equipment, or the worker may be physically driven into and crushed by other peripheral equipment; it can be deadly, as in the case of Baunatal), collision or impact (occur when a robot’s movements become unpredictable and a worker is struck by the robot) or by projection of materials (occur when parts of the robot , tool or product handled, breaks and fly off and hits a worker).
By rules applicable throughout the EU, it has been mandatory to provide a sufficiently large security perimeter to the entire workspace of the industrial robot that prevents access to the robot when in operation. When it will be necessary to enter to this area, the worker must perform some action to stop the robot, facilitating the access. Harmonised standards ISO 10218-1 and ISO 10218-2, “Safety requirements for industrial robots”, contain the minimum requirements for safe operation of these industrial robots.
This “separation” between workers and robots in an industrial environment is weakened through collaborative robots already available on the market (Universal Robots family of robots, ABB’s YuMi, KUKA’s LBR iiwa…) and the new technical specification ISO/TS 15066:2016, “Collaborative Robots”, that specifies the safety requirements for collaborative industrial robot systems and the work environment. The standard describes different concepts of collaboration and requirements needed to achieve them. The ISO standard also points out that the collaborative operation is a developing field and the new technical specification is likely to evolve in future editions.
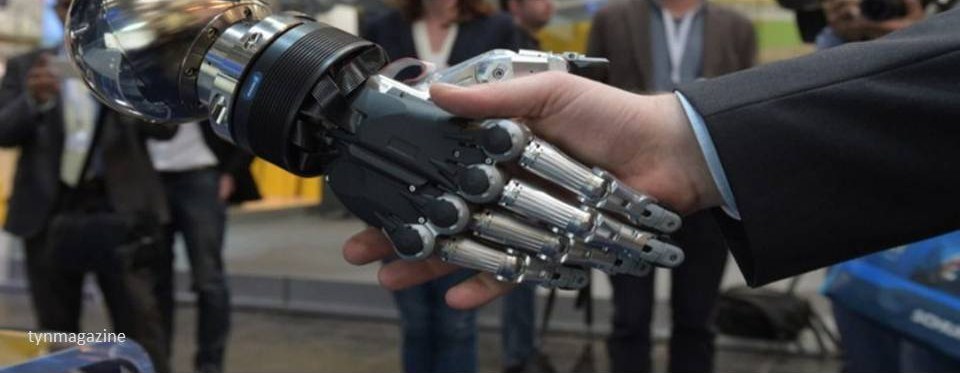
Collaborative robots are designed to operate in a shared workspacewith workers without the need for conventional protections, safety cages or safety barriers. The main premise in the design of these robots is the safety of workers (Asimov’s first law of robotics: “a robot will not harm a human being”). These robots are designed to work side by side with workers.
The proximity of workers and robots requires a great safety design based on a combination of mechanical design and control measures, both the manipulator and the workspace. So rather than talking about collaborative robots, in CARTIF we prefer to speak of safe collaboration spaces (collaborative spaces). Besides the robot is safe, so it is the applications and working environments.
To ensure safety can be used different technologies and security measures. Lightweight manipulatorswithout shearing or cutting points, with rounded geometries, smooth surfaces and deformable or elastic components. Speed, acceleration and power can be limited. Current, force, torque sensors can be integrated to detect collisions. Real-time movement of the robot can be adjusted with proximity and tactile sensors. In order to be “aware of the collaborative space” it can be added visual systems based on 2D/3D computer vision technologies.
Usually, collaborative robots are similar to traditional industrial robots but smaller, lighter, less fast and powerful, cheaper and easier to install and configure. These robots do not need to be fast or powerful as they are specially designed to interact with workers. As experts say, in a collaborative space, the worker can bring skills, flexibility and, above all, ability to identify, understand and solve problems, and the robot provides repeatability, accuracy and endurance. Nevertheless, the ISO/TS 15066:2016 standard does not limit the capabilities of the robot in collaborative applications.
Without doubt, the search for solutions that reduce emissions of passenger transport is one of the points where more efforts are being made. The electrification of urban bus is one of the points where most are working, there are several strategies that we will be reduced to two:
• Vehicles with a large capacity battery: ensure autonomy and recharge while standing. The main problem is the batteries: high cost, weight and volume to the Service.
• Vehicles with fast / ultrafast load at stops start / finish line: they need recharging infrastructure with high power at some stops. In this option, the bus will take the bus a motor that will ensure the service.
The REMOURBAN project, led by CARTIF, will work to integrate in Valladolid line 7 a demonstrator based on the second option.
The main objective of the project is to demonstrate a pilot fleet of innovative public transport vehicles (buses) that combine outstanding performance with low-energy consumption. This will be achieved by introducing hybrid buses with a newly developed plug-in technology, which makes it possible to electrify a major part of the city bus lines.
The project will demonstrate that this technology can contribute to reducing harmful emissions from European city public transport systems.
The project will demonstrate:
• A new plug-in technology for hybrid buses: the complete vehicle will be optimised to ensure high standards of drivability, performance, durability and safety;
• A fast charging service for the buses: a reliable and efficient solution for charging is of crucial importance for the future use of plug-in technology. An effective service must take account of the location of the charging system, as well as safety, time efficiency, environmental and spatial considerations.
• The new hybrid plug-in technology and charging service will be demonstrated on an existing public bus route: The ultimate goal of the project is to test both of these important factors in city traffic.
Expected results:
• Reduced CO2 emissions: reduced fuel consumption, combined with electricity generated from renewable sources, will reduce CO2-emissions, compared to standard diesel vehicles;
• Improved energy efficiency: less energy consumption than standard diesel buses;
• Reducing emissions of hazardous substances: a substantial reduction in diesel consumption, combined with more favorable driving conditions, will result in a reduction in emissions of NOx, PM, HC and CO;
• Less noise: in electrical operation will radically reduce the noise of the buses, especially in sensitive areas;
• Zero-emission areas: in selected areas, the buses will run on electricity only, making these “zero emission” areas.
In the first part of this post, we talked about the conclusions we heard in an interesting conference about air quality. After that, we decided two to do two things. On the one hand, to share the figures and conclusions there exposed and on the other hand, to work at self-examination, thinking about our behavior as citizens. What happens when someone asks us if we are willing to use public transport more often? Or to organize ourselves to reduce the number of our daily trips using the private car? We broached the subject of our rights:
• We have a right tobuy wherever we want. We love e-commerce. We are able to buy Chinese oranges on the internet and to ask for bringing them to our home. And if we were not there when company arrives, we are asking for returning another time. To exercise this right involves the use of vans to our home with very low occupancy rates. And not visit the neighborhood greengrocer, of course!
• We have a right to have the car we want, with a good engine and diesel (don’t forget it is cheaper), even for an urban use such as shopping or bringing children to school
• We have a right tomove anywhere within the urban public space. We intend to arrive to the center of our city driving and to find available parkings there. It is better than largest urban parks.
• We have a right to choose where to live and normally, we prefer the suburbs, with good quality of life (and good air). Moreover, we are moving with our private car whenever necessary, regardless of the reason. And of course, being the only occupant of our vehicle.
• We have a right to have public transport, anywhere and at any time, although sometimes the transports are running practically empty at certain periods.
• We have a right not to meet delivery vans in the middle of the street and we agree on the fact that Authorities restrict the time in which they are able to circulate through the city center. This means that companies have to increase their fleet with vans with poorer quality in order to have more available units and, consequently, to ensure orders. Including our oranges.
• We have a right to have dumpsters on our doorstep, with frequent domestic rubbish collection. If we do not check that truck passes several times a day, we are complaining.
• We have a right to review our vehicles periodically, but we order to companies which carry out the compulsory vehicle tests not take too long in the review and not to be expensive. Implementing appropriate control systems for detecting “big high-polluting cars” would require longer reviews and a higher price.
We are sure that you have ever used these rights to defend your comfort zone but, in CARTIF, we are convinced too that, with a little effort, we could change our habits by more sustainably customs. We know that awareness always takes time, but the same situation happened when the waste separation was legislated or when smoking in public places was banned, and both or them are now fully integrated into our daily practices.
For this reason, we are asking the authorities to let experts advise them both for implementing more measures to encourage sustainable behaviors and to penalize those which are damaging in excess. That is, we should support to have a little less of “individual freedom” in order to have a better air quality.
Because with the use of “our rights” what we are really doing is limiting the freedom of others. The elderly, children or people with respiratory diseases are risk groups and their health largely depends on the quality of the air they breathe.
Miguel de Cervantes wrote in his work Don Quixote: “Freedom, Sancho, is one of the most precious gifts that heaven has bestowed upon men; no treasures that the earth holds buried or the sea conceals can compare with it; for freedom, as for honour, life may and should be ventured (…) “.
The increase in life expectancy, coupled with the decline in the birth rate results in an increasingly aging population. According to projections by the National Statistics Institute, 30% of the population will be aged over 65 in 2050, and of these a third will be octogenarians.
This large population will present assistance needs which will scarcely be covered by the working population. Assistive robotics has emerged as a solution that can help alleviate this problem. Assistive robotics is the area of service robotics in which the robot interacts directly with the individual. The scope is very broad; robots can be designed to aid a person’s mobility (standing, walking, etc.), help in physical or cognitive rehabilitation and supply social support, care and entertainment. Unfortunately, the expectations that have been generated for this type of robots have been very high, partly because of movie robots: Walle, R2D2, C3PO, Short Circuit, etc., all have capabilities similar to humans. However, there are few robots that have been introduced in the market except for robot vacuum cleaners, lawn mowers and pool cleaners. The success of these robots is undoubtedly that they carry out very specific activities at a reasonable cost.
The main difficulty with care robotics is that they interact with people, so they must have robust perceptual systems, motion, manipulation, cognition capacities and interaction systems designed to communicate with humans using natural and gestural language.
The state of the current technology does not allow robots with those capabilities of movie robots to be developed. The solution is to develop robots with capacities restricted to defined contexts, limiting its functionality while ensuring proper integration of all subsystems that can overcome the envisaged situations. For example, the solution of a sequential complex problem such as a verbal dialogue with a robot can be to restrict the vocabulary and the topic discourse. This contextual grouping can be applied to other aspects like visual recognition or emotional control.
Another recommendation is that experimentation needs to be done from the beginning in real environments where the robot must work. Often, the efforts are focused on developments in the laboratory away from the end users and services to be provided.
A good methodology is to do iterative and successive refinements in the robot, incorporating new features and capabilities over time. The definition of metrics allows robot evolution and performance to be measured according to user requirements.
However, not only scientific barriers prevent robots from reaching the market. There are also social barriers that must be overcome. Often, there are serious drawbacks which prevent robots from being accepted by people: appearance, fear of technology, or fear of losing their job to the robots. These social aspects should be considered in the early stages of robot design.
Over the last few years in CARTIF, we have applied this design methodology based on user needs. Our latest challenge is Sacarino, a robot with social and interaction abilities which will provide therapy, assistance and entertainment in one of the living units at the Hermanas Hospitalarias Hospital in Palencia. Hopefully, we shall be able to contribute to the development of welfare robots and, in a few years’ time, care robotics will be a reality which could provide value-added services and would be present in our homes and hospitals.
Every day in the supermarket, we have to face the decision to buy one product or another. Unconsciously, and according to experts, we dedicate about 6 seconds to choose. If we only look on nutritional aspects, manufacturers must be able to communicate that their products offer advantages in relation to others. Thus, by nutrition labeling, manufacturers inform us about nutrients that a food gives us (nutrition claims) and even gives us information about possible health effects (health claims).
From the consumers’ point of view, nutrition labelingwould allow to choose a product knowingly, favoring even some changes in their eating behavior. Until now, at European level, some models for nutritional information have been designed so that information arrive easily to consumers, such as the use of Guideline Daily Amount (GDA), the nutritional traffic light, different symbols or health logos, etc. However, it does not seem that we are getting it, because some labeling studies continue showing that this information is difficult to understand for almost the 44% of people.
Having in mind that in the UK more than two thirds of the population is overweight or obese, the Royal Society for Public Health insists on the urgent necessity to propose innovative measures, relating to the labeling, able not only to provide information, but to change the consumer behavior. And for this, they propose to inform about the calories of food from a totally different perspective. So, instead of indicating the calories of a food, the product provides us the information about the necessary physical activity indicated to spend those calories, it means ‘equivalent activity’.
At the beginning, I have to admit that I like this labeling proposal, because it offers an easy reference and understandable for all, and it encourages to think about the necessary balance between calories consumed and those that are spent. But the best thing is that this initiative uses positive reinforcement, so that encourages us to get started in physical activity rather than stop eating certain foods. In this way, I believe that it could be possible to influence in the eating behavior of consumer and their lifestyle. I think that now the message that my brain receives will be: ‘you will burn these sweet biscuits with the sweat of your brow’, instead of ‘if you eat these biscuits, they will live in your body forever’.
Other proposal for labeling, which comes from the same British company, is based on including photos with the amount of sugar or salt that a food carries. Of course, the impact of reading that you are ‘eating’ 60 grams of sugar with a drink is not the same as watching equivalent to 15 sugar cubes. Is it?
I want to call these brilliant and wonderful ideas of labeling ‘ideas of clear labeling’, and I hope to collect more of them in order to tell them us in this blog.
Augmented Reality (AR) is a technology that is little by little is making way in our daily lives. In broad terms, it consists in embedding digital information to the reality we have before our eyes through real-time superposition of this information about the image that provides our device, either a Smartphone, Tablet or a Smart Glasses.
Therefore, to use this technology is not necessary to have special devices. Thanks to the mobile devices development, equipment available to everyone as those mentioned before, can be the instrument that will allow access to the world of Augmented Reality (AR). It is true that in the last years are emerging new devices such as the Smart Glasses that are adapted specifically to this type of applications, and allow provide a better user experience by leaving freedom of movements of their hands. It is expected that with the development of new applications these devices will be entering in the consumer market in a generalized manner, as has happened with other devices such as smart watches, or activity tracker wristbands.
There are many applications of Augmented Reality (AR) and are varied. Most of them are oriented to leisure and tourism. As an example, there are applications that just taking a picture of a monument or a work of art, can provide you with information about it, its history, or oddities such as images of their appearance in the past.
New applications are emerging constantly related to leisure, mobility, marketing and advertising, including additional content that improve and enhance the user experience. These contents can be quite varied, including explanatory texts, links to supporting documentation, videos, images, indications for locating places or events, etc.
Equally, new applications are emerging for use in professional fields, such as architecture, to show designs and scale models, marketing and sales, for example catalogs that include QR codes to display additional content, medicine or education, which presents countless opportunities for the expansion of content through videos, tutorials or examples, allowing to learn in a more enjoyable and didactic way.
The industrial environments also are becoming an important field of application of Augmented Reality. Most experts expected that large-scale implementation in the industrial area will take place in the next three to five years as an increasingly robust technology. CARTIF is involved in some projects that apply the augmented reality to maintenance work in the industry.
Through the use of a Smart Glasses, the technicians are able toperform their tasks as they have always done, since they have complete freedom to use their hands, and at the same time they can access, for example, to technical specifications sheets for particular equipment, to the drawings of a facility, or the operating and malfunction history for a machine.
It would also be possible to guide the maintenance operator in performing a particular task, indicating the steps to be carried out and checking when and how has performed them. In the same way, they could be very useful in the training of novice operators for the accomplishment of these tasks, or even that the managers can monitor and evaluate the performance of operators.