#HambreCero es el lema del Día Mundial de la Alimentación que se celebra el 16 de octubre liderado por la Organización de las Naciones Unidas para la Alimentación y la Agricultura (FAO) a nivel mundial. El #HambreCero también forma parte de los Objetivos de Desarrollo Sostenible (ODS) de la Organización Mundial de la Salud (OMS).
Lograr el #HambreCero no se trata solo de alimentar a las personas que padecen hambre, sino también de hacerlo de una manera saludable y sostenible. La seguridad alimentaria en nuestro tiempo no es solo una cuestión de cantidad, sino también de calidad. Las dietas poco saludables se han convertido en el primer factor de riesgo de enfermedad y muerte en todo el mundo y es por eso que necesitamos llegar a toda la población con una variedad suficiente de alimentos seguros, nutritivos y asequibles, cuidando la salud del planeta del que todos dependemos. El Día Mundial de la Alimentación nos pide que actuemos en todos los sectores para alcanzar el #HambreCero, 100% nutrición.
Pero, ¿qué es una dieta sana y sostenible? La propia FAO determina que una dieta saludable es aquella que proporciona las necesidades nutricionales para mantener una vida activa y reducir el riesgo de contraer enfermedades mediante el consumo de alimentos inocuos, nutritivos y diversos. Y una dieta sostenible respalda soluciones arraigadas para la producción de alimentos con un bajo nivel de emisiones de gases de efecto invernadero y un uso moderado de recursos naturales como el suelo y el agua, al tiempo que aumenta la diversidad alimentaria para el futuro.
¿Cuál es la situación actual?
El alto consumo de platos ricos en azúcares, almidones refinados, grasas y sal se han convertido en la base de la alimentación de los países desarrollados, limitando el consumo de platos tradicionales elaborados con verduras, legumbres, cereales integrales, etc. Cocinamos menos, nos movemos menos y consumimos platos más preparados. El resultado es que estamos desnutridos. ¿Lo encuentra alarmante? ¿No crees que es por tanto? Veamos algunas cifras:
Actualmente, ya hay más personas con obesidad y sobrepeso en el mundo que las que tienen hambre: casi 800 millones de personas (672 adultos y 124 niños) en el mundo padecen obesidad y otros 40 millones de niños tienen sobrepeso. Sin embargo, se estima que hay alrededor de 820 millones de personas que padecen hambre (aproximadamente una de cada nueve).
Las dietas poco saludables junto con los estilos de vida sedentarios han superado al tabaquismo como el principal factor de riesgo de discapacidad y muerte en el mundo.
Aproximadamente 2.000 millones de euros se gastan cada año para tratar problemas de salud relacionados con la obesidad.
Estas son algunas de las conclusiones a las que llega la FAO en relación con el hambre y la malnutrición pero no son las únicas. Nuestra forma de alimentarnos también está teniendo consecuencias ambientales:
El daño ambiental causado por el sistema alimentario podría aumentar del 50 al 90%, debido al mayor consumo de alimentos procesados, carnes y otros productos de origen animal en los países de ingresos bajos y medios.
De unas 6.000 especies de plantas cultivadas para la alimentación a lo largo de la historia de la humanidad, hoy solo tres especies (trigo, maíz y arroz) suministran casi el 50 por ciento de nuestras calorías diarias. Necesitamos consumir una amplia variedad de alimentos nutritivos.
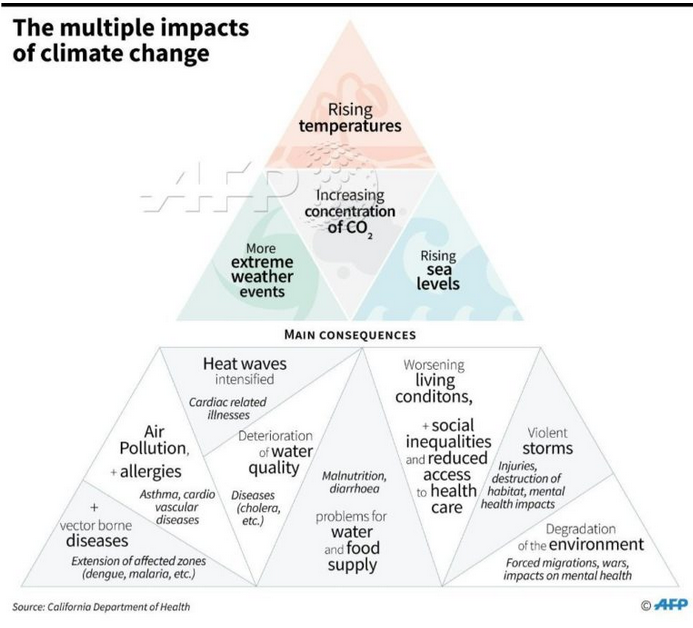
El cambio climático amenaza con reducir tanto la calidad como la cantidad de cultivos, reduciendo los cultivos. El aumento de las temperaturas también está agravando la escasez de agua, cambiando la relación entre plagas, plantas y patógenos y reduciendo los recursos marinos.
El sistema alimentario actual, que incluye la agricultura, la ganadería, el procesamiento, el envasado y el transporte, es responsable del 37% del total de emisiones de gases de efecto invernadero (GEI) generadas anualmente, y las pérdidas y el desperdicio de alimentos también colabora con el 8-10% del total. suma. Belén Blanco nos cuenta con más detalle en el post «Dime lo que comes … y te diré si es bueno para el planeta».
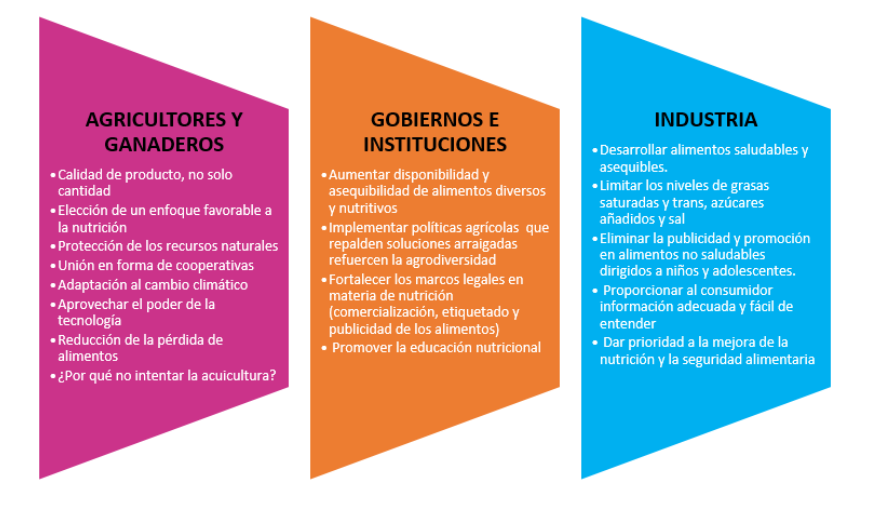
Por todo esto, porque son realidades, todos juntos debemos concienciar sobre el problema del hambre, la desnutrición, el desperdicio de alimentos, el cambio climático, etc. La FAO hace un llamado a todas las personas a involucrarse en la implementación de alguna medida para lograr el #HambreCero.
¿Quiénes son los actores involucrados en este cambio que se está produciendo? La respuesta es todo. Modificar la forma de producir, suministrar y consumir alimentos. La participación de la industria en la limitación de grasas saturadas y trans, azúcares añadidos y sal. Eliminar la publicidad y promoción en alimentos poco saludables y especialmente aquellos dirigidos a niños y adolescentes. Implementar programas educativos sobre nutrición y salud. Son necesarias acciones de todos los niveles.
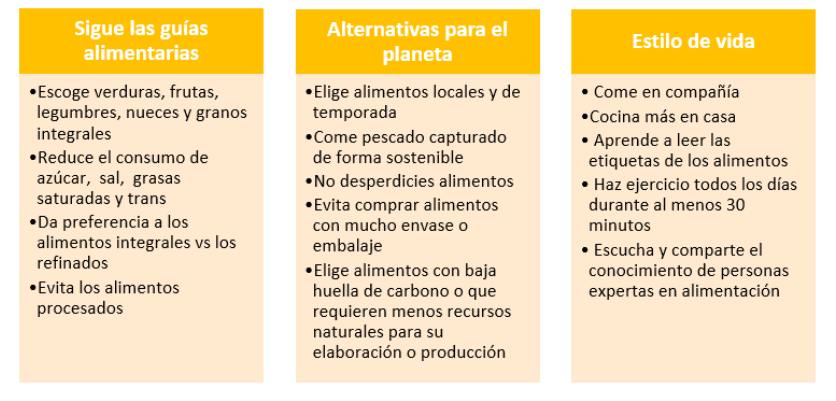
Y yo, como consumidor, ¿qué puedo hacer? Como consumidor, como ciudadano, como ser humano en este planeta, puede hacerlo. Piensa en cómo consumes, cómo comes y actúas por tu cuenta, a nivel individual y con las personas que te rodean. Aquí tienes una serie de medidas que pueden guiarte:
El Día Mundial de la Alimentación no es el único foro en el que se esfuerza por mejorar la seguridad alimentaria, pero la FAO también participa con la OMS y otras agencias en la implementación del Decenio de las Naciones Unidas para la Acción Nutricional (2016-2025). Su objetivo es fortalecer la acción conjunta para reducir el hambre y mejorar la nutrición en todo el mundo y ayudar a todos los países en sus compromisos específicos. El informe SOFI se publica anualmente para proporcionar información sobre los avances realizados para erradicar el hambre, lograr la seguridad alimentaria y mejorar la nutrición. El último fue publicado el 15 de julio de 2019.
En el Día Mundial de la Alimentación, la FAO lanza un mensaje contundente: podemos acabar con el hambre y todas las formas de malnutrición para convertirnos en la generación #HambreCero. Pero esto supondrá la acción conjunta de todos, desde el compromiso de cada uno de nosotros en el cambio en la forma en que nos alimentamos, hasta la cooperación entre países para una transferencia eficiente de tecnología, por ejemplo, a través de la correcta toma de decisiones de gobiernos o por la participación de empresas privadas y medios de comunicación.
Como ya sabrás, el aumento de las emisiones de gases de efecto invernadero (principalmente dióxido de carbono y metano) como consecuencia de la actividad humana es una de las principales causas del ritmo más acelerado del cambio climático en las últimas décadas. Y entre la amplia gama de causas, los turismos son una de las principales fuentes de emisiones de CO2, representando un 12% de las emisiones totales (Comisión Europea).
Por este motivo, la Unión Europea viene adoptando medidas cada vez más estrictas para regular los niveles de emisiones. En 2015, se estableció un límite de 130 gramos de CO2 / km. Además, para 2021 se prevé fijar un objetivo más ambicioso en 95 gramos de CO2 / km.
En este contexto, los fabricantes de automóviles se han visto obligados a reducir el consumo de combustible (o aumentar la autonomía en los vehículos eléctricos) y las emisiones en sus modelos de gasolina y diésel. ¿Cómo pueden hacer eso los fabricantes de automóviles? Además de diseñar motores más eficientes, la estrategia principal es el aligeramiento. Esta técnica consiste en reducir el peso del coche sustituyendo los materiales más pesados (es decir, el acero) por otros más ligeros como el plástico o los composites.
Sin embargo, actualmente la mala gestión y el mal uso de los plásticos en lugar del material en sí es uno de los principales problemas ambientales, ya que 8 millones de toneladas de los 300 millones de toneladas de plástico que se producen anualmente terminan en el océano (según datos de International Unión para la Conservación de la Naturaleza). Entonces parece que aumentar el uso de plásticos en los automóviles no parece una solución ideal, ¿verdad? Bueno, ¿qué tal si se utiliza un material alternativo con un rendimiento similar o incluso mejor que los plásticos convencionales y una huella medioambiental reducida? No parece una tarea fácil, aunque los bioplásticos pueden ser parte de la respuesta.
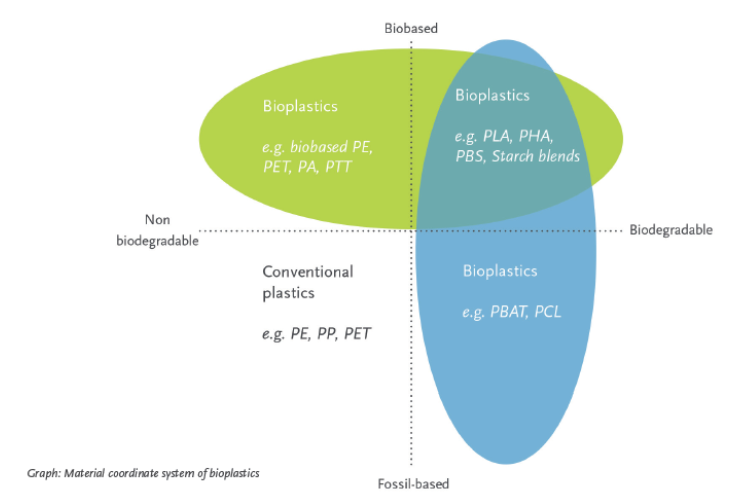
¿Qué son los bioplásticos y por qué parecen estar tan de moda hoy en día? Según European Bioplastics, se trata de un conjunto heterogéneo de materiales con diferentes propiedades y aplicaciones que pueden ser de base biológica, biodegradables o ambos.
En otras palabras, los bioplásticos, al ser de base biológica, su uso reduce potencialmente el consumo de combustibles fósiles mientras que su biodegradabilidad amplía las posibilidades de tratamiento en la etapa final de su vida útil. Como resultado, estos materiales podrían lograr la combinación deseada de rendimiento y sostenibilidad..
De eso se trata el proyecto BIOMOTIVE. Intenta desarrollar materiales (fibras textiles, espumas de poliuretano para asientos de automóviles y otras piezas a base de poliuretano para el interior de automóviles) a partir de fuentes de origen biológico que combinan buenas propiedades técnicas con un impacto ambiental reducido. Partiendo de materias primas renovables como biomasa forestal y aceites vegetales que no compiten con la cadena alimentaria, se espera producir a escala industrial productos con hasta un 80% de contenido de base biológica.
El proyecto ha recibido financiación del Programa de Investigación e Innovación Horizonte 2020 de la Unión Europea y reúne a empresas e instituciones privadas europeas que comparten el ideal de reducir el impacto de la industria allanando el camino hacia una economía más sostenible.
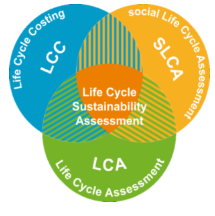
El papel de CARTIF en el proyecto es realizar la evaluación de la sostenibilidad de los productos finales, ya que el prefijo «bio» no significa necesariamente que un producto sea mejor para el medio ambiente que su contraparte de origen fósil. Para determinar que con base científica, es importante evaluar los impactos del producto a lo largo de todo su ciclo de vida (es decir, desde la extracción de las materias primas hasta el final de su vida útil) considerando no solo los impactos ambientales, sino también sociales y aspectos económicos.
Entonces, la próxima vez que sostenga un objeto de plástico, antes de tirarlo, vale la pena considerar de dónde vino y adónde irá.
Cada vez somos más conscientes de los alimentos que consumimos, del aporte nutricional que tienen y del impacto que nuestros hábitos de compra y consumo tienen sobre el planeta. O así debería ser.
La comida que consumimos, es decir, nuestra forma de alimentarnos, contribuye de un modo u otro a nuestra salud, pero también a la salud del planeta dejando una huella climática. Concretamente, los alimentos contribuyen al efecto sobre el calentamiento global a través de su cultivo, de cómo se han criado los animales, de cómo se han almacenado, procesado, envasado y transportado estos alimentos a los distintos mercados de todo el mundo.
La manera actual de producir comida para alimentar a la población mundial está afectando de manera muy significativa a los ecosistemas terrestres y marinos, contribuyendo así al evidente cambio climático. No se trata de ser alarmista, pero sí de tomar conciencia con una realidad que ya está aconteciendo y a la que debemos hacer frente.
El pasado 8 de agosto, se ha publicado un informe del Grupo Intergubernamental de Expertos sobre el Cambio Climático de la ONU (IPCC, 107 expertos de 52 países) con el nombre de “El Cambio climático y La Tierra”. En este documento las cifras hablan por sí solas y revelan que el sistema alimentario actual -en el que se incluye cultivo, cría de animales, transformación, envasado y transporte- es el responsable del 37 % del total de las emisiones de gases de efecto invernadero (GEI) que se generan anualmente, y que las pérdidas y el desperdicio de alimentos colabora, además, con un 8-10 % de la suma total.
Las consecuencias de estas emisiones están directamente relacionadas con el aumento de la concentración de CO2 en la atmósfera, el incremento de la temperatura del planeta, los desastres climatológicos o la subida del nivel del mar, que se traducen en una clara amenaza sobre la calidad y cantidad de los cultivos actuales. Por tanto, está en riesgo el aseguramiento de alimentos para la población, para los habitantes del planeta, para todos nosotros.
Es necesario, por tanto, abordar los riesgos que ya están presentes y reducir las vulnerabilidades en los sistemas de producción y distribución de la comida y la forma de gestión del suelo.
De acuerdo con los datos del informe del IPCC, el cambio climático afectará a la seguridad alimentaria limitando el acceso a determinados alimentos, reduciendo la calidad nutricional y aumentado sus precios. Los efectos serán mucho más marcados en los países con bajos recursos.
Las medidas que se derivan del Informe están enfocadas a limitar el calentamiento global a 1,5 ºC en lugar de 2 ºC, y, sin embargo, esta diferencia de medio grado es crucial sobre los efectos en el suelo, en las especies marinas y en los ecosistemas, así como sobre los beneficios que esto aportaría en la naturaleza para todos los humanos; pesca, suministro de agua y aseguramiento de comida, además de la salud, seguridad y crecimiento económico.
Para limitar el incremento de la temperatura, se requiere de una reducción en las emisiones de CO2 y otros GEI en un 45 % para 2030 (respecto a los niveles de 2010) y lograr cero emisiones para 2050. Esto requiere de un profundo cambio y una rápida actuación en la reducción de dichas emisiones en todos los sectores (energía, tierra, ciudades, transporte, edificios, industria) por lo que es necesaria una mayor inversión en la aplicación de nuevas estrategias.
Con el enfoque puesto en estas acciones encaminadas a la adaptación y mitigación del efecto del cambio climático, en el informe se indican como mejores oportunidades; un cambio urgente de dieta para conseguir una reducción en las emisiones de GEI ligadas con la producción de alimentos, una mejora en los sistemas de producción de carne y vegetales para reducir el consumo de energía y agua que actualmente se utiliza y, una reducción, hasta conseguir su completa eliminación, de las pérdidas y el desperdicio alimentario.
Lo que se entiende como una dieta saludable y sostenible incluye alimentos que tienen una menor huella de carbono, por lo que dicha dieta estaría fundamentada en el consumo de vegetales, legumbres, cereales, frutos secos y semillas como alimentos esenciales y alimentos de origen animal producidos en sistemas resilientes, sostenibles y de baja emisión de GEI.
En el informe se indica expresamente que, en la actualidad, los sistemas de cría de animales para producir carne y derivados demandan más cantidad de agua y suelo y generan mayores emisiones de gases comparados con los de producción de cereales y semillas. Este efecto es mayor en los países desarrollados donde la cría se realiza de manera intensiva y se insta a producirlos de manera sostenible.
En el estudio realizado por Poore & Nemecek (2018) también se evidenció que el impacto ambiental de la producción de alimentos de origen animal excede al de la producción vegetal, poniendo de manifiesto la necesidad de reformular las prácticas que se llevan a cabo en esta actividad. También pusieron de manifiesto que, aunque los productores son una parte vital de la solución a este problema, su habilidad para reducir el impacto ambiental es limitada. Estos límites se traducen en que un mismo producto puede tener un mayor impacto que otro nutricionalmente equivalente y por ello, también en su estudio instan a un cambio en el patrón de la dieta.
La necesidad de adaptar nuestra dieta a los límites de los aspectos de sostenibilidad es evidente y, tanto se considera así, que el IPCC se refiere a ellas en su informe como “dietas de baja emisión de gases de efecto invernadero”.
Las dietas de baja emisión de gases de efecto invernadero (GEI) son dietas balanceadas que requieren menos agua y menos uso de la tierra y causan menos GEI. Se trata de dietas con más alimentos a base de granos, legumbres, frutas, verduras, frutos secos y semillas y alimentos de origen animal producidos de manera sostenible
Otras acciones encaminadas a la diversificación de los sistemas alimentarios que se proponen en el informe en relación a la forma de generación de alimentos son: la implementación de sistemas de producción integrados, la mejora de recursos genéticos, sistemas agrícolas más inteligentes e integrados, mejores prácticas de producción ganaderas y la reducción del uso de fertilizantes. Todas ellas, con la finalidad de reducir el impacto ambiental mediante una mejor gestión del suelo como estrategia para lograr un aprovechamiento sostenible y, por tanto, una producción alimentaria de calidad.
En cuanto a la reducción del desperdicio de alimentos, está dirigida a frenar la necesidad de producir más y, por tanto, a reducir la sobreexplotación del suelo y el consumo de agua y fertilizantes a base de nitrógeno, la deforestación de zonas para convertirlas en suelo agrícola y, en el ciclo en el que estamos actualmente, las cosechas de baja calidad, más pobres en nutrientes y que conllevan una previsible subida del coste de los cereales.
No existe una única solución si no la suma de muchas y diversas acciones.
Necesitamos replantear nuestro actual sistema alimentario y encontrar nuevas soluciones para alimentarnos en un planeta que sigue creciendo. Estamos ante el reto de encontrar soluciones efectivas para producir alimentos de manera sostenible. La forma en que producimos los alimentos importa, por tanto, importa la forma en que seleccionamos lo que vamos a comer, puesto que puede colaborar con la mitigación del cambio climático y con la reducción en la presión que estamos ejerciendo sobre la tierra.
Lo que comemos tiene una historia que contarnos… y esa historia, nos hace responsables y cómplices de esos efectos. Es importante dar un paso adelante en nuestra dieta y comenzar a pensar en lo que comemos más allá del aspecto hedónico, ya que nuestras acciones de consumo afectan a la capacidad productiva del suelo y, por tanto, a la calidad de lo que se produce e incluso al valor nutricional de los alimentos. Por otra parte, la concienciación con una dieta más sostenible, además de colaborar en la mitigación de los efectos del cambio climático, probablemente ofrezca unos efectos positivos en la salud a medio plazo.
En el arduo camino hacia un desarrollo sostenible, la investigación para la obtención de combustibles alternativos a los fósiles se presenta como punto clave. En este marco, dos interesantes actores han surgido para quedarse: el biogás y el biometano.
Antes de entrar en materia, ahondemos un poco en el actual sistema gasístico nacional. El gas natural es uno de los combustibles más utilizados por la sociedad, tanto en la industria como en los hogares. Químicamente, se trata de un gas compuesto principalmente por metano 95-99% (CH4) y por pequeñas proporciones de otros compuestos. De su tratamiento, gestión y consumo en España, debemos conocer dos aspectos importantes:
El 99% del gas natural consumido en España el año pasado provino de fuentes no renovables.
Es importado en su mayoría desde países como Argelia, Noruega, Nigeria o Catar, bien a través de la red de gaseoductos o mediante el transporte de gas licuado en grandes barcos gasistas.
Si bien es cierto que, en comparación con otros combustibles tradicionales, la utilización de gas natural está mejor vista ya que rebaja las emisiones de CO2, partículas y NOx,no deja de ser un combustible fósil. Actualmente, se estima que quedan unas reservas mundiales de 193 billones de m3, suficientes como para cubrir la demanda durante 52 años.
El biogás y biometano se plantean como una interesante alternativa sostenible en la cadena de suministro de combustibles. Se conoce como biogás al gas combustible resultante de la degradación de compuestos orgánicos mediante un proceso biológico. Dependiendo de los precursores utilizados, la composición en volumen del biogás oscila entre el 50% y 70% de metano y 50% y 30% de CO2. El biogás es un combustible idóneo para generar calor o electricidad, pero, debido a su baja concentración de metano, no puede ser utilizado en su forma original como combustible para el transporte ni se puede inyectar a la red de gas natural. No obstante, puede ser “mejorado” (upgrading) para ser apto para estas dos últimas aplicaciones. A este biogás mejorado se le conoce como biometano. El ratio CH4/CO2 del biometano oscila entre 95/5 y 99/1, composición muy similar a la del gas natural.
La clave para que el biogás y el biometano sean considerados gases sostenibles reside en utilizar como materia prima del proceso residuos que no pueden ser ni reutilizados ni reciclados. No solo hablamos de los típicos residuos urbanos que van al vertedero, también resultan de alto interés residuos agrícolas, ganaderos o provenientes de aguas residuales. Estos residuos, al degradarse, emiten espontáneamente metano a la atmósfera, cuya repercusión en emisiones de efecto invernadero (GEI) es 21 veces superior a la del CO2. De esta manera, este metano es generado de manera controlada y tras combustionar se transforma en CO2, reduciendo así el impacto de emisiones de GEI.
El potencial que tiene España para desarrollar biogás y consecuentemente biometano es muy amplio. La agricultura y la ganadería, dos de los principales motores de la economía nacional, generan una extensa cantidad de residuos de muy buenas características “metanables”. Así mismo, cada español genera al año media tonelada de residuos directos, lo que supone un total nacional de aproximadamente 22 millones de toneladas por año. El hecho de poder convertir estos residuos en un combustible permite reducir las emisiones de gases de efecto invernadero, así como cubrir parte del consumo de gas natural importado. Las ventajas no son solo ambientales y económicas, pues este nuevo modelo permite además la creación de nuevos puestos de trabajo.
Para la generación del biometano existen múltiples tecnologías, y la digestión anaerobia seguida de un upgrading (mejora) es una de las más conocidas y explotadas. La digestión anaerobia consiste en introducir un residuo en un digestor en ausencia de oxígeno. En este digestor el residuo entra en contacto con un cultivo biológico (sí, bacterias) que será el responsable de ir descomponiendo (hidrólisis) las largas cadenas de carbono, típicas de la materia orgánica, en cadenas más sencillas. Con el paso de los días, estas bacterias prosiguen degradando las cadenas carbonadas más simples en metano. El producto de este proceso es una mezcla de gases, conocida como biogás, principalmente compuesta por metano (60%), CO2 (40%) y una mínima concentración de impurezas como ácido sulfhídrico. En el proceso se genera un residuo líquido llamado digestato, que puede ser reutilizado como fertilizante puesto que es rico en nitrógeno y fósforo.
Finalizada la digestión anaerobia, y como ya mencionamos anteriormente, es necesario mejorar la calidad del biogás para que pueda ser utilizado como combustible de vehículos o inyectado a la red de gas natural. A este proceso se le conoce como ‘upgrading’, y permite que el biogás alcance una concentración cercana al 99%. Existen diferentes tecnologías que permiten realizar este proceso:
Absorción con Aminas: las aminas tienen gran selectividad para atraer al CO2. El proceso consiste en “duchar” el biogás con una disolución de aminas, las cuales van a arrastrar el CO2, dejando casi puro el metano. El gran inconveniente de este proceso es que las aminas no son ambientalmente favorables.
Adsorción con oscilación de presión: a altas presiones, los gases tienden a ser atraídos a superficies sólidas o «adsorbidos». Cuanto mayor sea la presión, más gas se adsorbe. Una vez se reduce la presión, el gas se libera o se des-adsorbe. Este proceso necesita una inversión inicial muy elevada.
Membranas: se trata de una separación física, pues se hace pasar la corriente de biogás a través de una membrana porosa. El CO2 pasa por los poros, mientras que el metano permanece. Para obtener buenos rendimientos de separación es necesario aplicar altas presiones encareciendo el proceso, adicionalmente se suelen producir pérdidas de metano de entorno a un 20% a través de los poros de las membranas, especialmente según se van deteriorando.
Contactores de membranas: son los más novedosos de los expuestos. Esta tecnología aglutina numerosas membranas en una misma carcasa, permitiendo hacer pasar el líquido por el interior de las membranas y la corriente gaseosa por la carcasa. De esta manera se combina una separación física y química. Así se puede trabajar a presiones más bajas que en las membranas tradicionales, pues el agua es capaz de disolver parte del CO2, así mismo se reducen las pérdidas de metano.
Una vez purificado el biometano, este estaría casi listo para su utilización final o inyección a la red. El último proceso necesario sería comprimirlo hasta la presión normal de trabajo. Por ejemplo, la red de gas natural se encuentra a una presión de entre 16 y 60 bares, o, si se desea utilizar como combustible, se requiere una presión de aproximadamente 200 bares.
Los esfuerzos en investigación y desarrollo en campo del biogás y biometano son múltiples. Los temas de mayor interés actualmente son la búsqueda de pretratamientos para materias primas, co-digestión de residuos, captura del CO2 del biogás, tratamientos alternativos de upgrading o fermentación de gas de síntesis entre otros.
En algunos países europeos como Alemania o Italia ya existen instalaciones industriales que permiten la producción de biometano, sin embargo, en España el mercado del biometano está aún por explotar. Conociendo el potencial que tenemos para desarrollar la tecnología, son necesarias políticas que hagan que este mercado se vaya abriendo poco a poco y así poder producir nuestro propio biometano. De esta manera, se reducirían las importaciones de gas, la cantidad de residuos producidos y las emisiones de efecto invernadero (y sus correspondientes sanciones de UE), y a la vez se crearían nuevos empleos.
Con la promesa de 75 mil millones de dispositivos conectados a Internet por todo el mundo en 2025, el ‘internet de las cosas’ (IoT) abre las puertas a un futuro de oportunidades para que las empresas optimicen sus procesos, ya sea en la forma de fabricar sus productos, supervisando su calidad o vigilando las máquinas críticas en las fábricas: hornos, líneas de fabricación o almacenes refrigerados.
En nuestro día a día como consumidores, nos podemos encontrar multitud de ofertas tecnológicas en dispositivos IoT que integramos en nuestras vidas de una forma rápida y, en ocasiones, impulsiva, ya sea por modas o beneficios reales. Sin embargo, la incorporación de estas tecnologías en las empresas no se realiza de una forma tan impulsiva, pues conlleva un estudio cuidadoso de factibilidad y rentabilidad, en muchas ocasiones complejo de demostrar, como sucede habitualmente con las tecnologías nuevas.
A estos factores, se une la flexibilidad del IoT para integrarse en las infraestructuras IT de las fábricas. La ‘i’ de IoT significa “internet”, lo que parece que lleva asociado automáticamente una conexión directa a Internet de “cosas” en las fábricas, y esto genera pánico por posibles amenazas de ciberseguridad para casi cualquier empresa. Para luchar contra estas barreras, la información y la formación son aspectos clave.
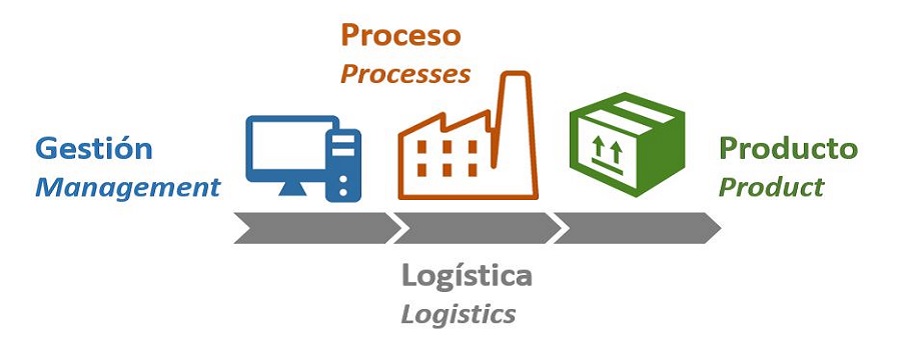
En este marco, se desarrolla el proyecto de cooperación transfronteriza España-PortugalIOTEC, que tiene como objetivo crear una red de colaboración de diferentes actores (investigadores, organismos públicos, proveedores de soluciones TIC y empresas industriales) de ambos países que facilite la creación e integración del IoT en las empresas. Los participantes en IOTEC hemos analizado diferentes empresas industriales y TIC para buscar carencias y fortalezas y poder así relacionar la oferta y la demanda de IoT. Desde CARTIF, coordinamos las actividades alrededor de las empresas industriales con el objetivo de conocer sus necesidades de IoT a través de un análisis detallado de sus procesos organizativos y productivos que incluyen la gestión, el diseño del producto, su proceso de fabricación y la logística.
Este análisis detallado incluyó la realización de una serie de auditorías tecnológicas a diferentes empresas agroindustriales, analizando el potencial de aplicación de IoT en diferentes partes de su proceso productivo. Se evaluaron 40 parámetros organizativos diferentes según la metodología definida dentro del proyecto IOTEC. Por ejemplo, en el apartado de los procesos de fabricación, se analizaron minuciosamente cuatro aspectos de gran relevancia:
El tipo de proceso o transformación productiva, que queda definido fundamentalmente por aspectos como las materias primas usadas o los pasos de fabricación.
Los requerimientos de trazabilidad de las materias primas, los productos intermedios y productos finales. Esta trazabilidad tiene especial relevancia en las empresas agroalimentarias.
El control del proceso de producción que se desencadena por diferentes mecanismos según la empresa: ordenes de producción, bajo demanda, disponibilidad de materias primas (e.g. vendimia).
La necesidad de captura de datos en plantacomo primera fase de digitalización completa de un proceso productivo.
Una vez analizados todos los parámetros, se realizó una clasificación exhaustiva de diferentes tecnologías IoT que podrían ser de aplicación en la industria y tener un impacto directo en la mejora de la eficiencia. A continuación, pueden verse dichas tecnologías:
Todas las tecnologías identificadas fueron priorizadas por los asistentes al «Foro de oportunidades de negocio a través de IoT y Blockchain» que tuvo lugar el pasado 14 de noviembre de 2018 en Valladolid. Los asistentes al evento tuvieron la oportunidad de reflexionar y votar sobre este conjunto de tecnologías para valorar su necesidad y la importancia de su difusión por parte del proyecto IOTEC. Una vez establecidas estas prioridades, ahora es necesario darlas a conocer para que los proveedores de soluciones IoT puedan adecuar sus ofertas a necesidades reales.
Asimismo, se trabaja en actividades de difusión y formación para acercar las tecnologías IoT y ejemplos concretos de su aplicación al conjunto de empresas industriales de las regiones de Castilla y León y Centro de Portugal participantes en la red IOTEC. Cualquier empresa proveedora o demandante de tecnologías IoT puede participar en el foro del proyecto y beneficiarse de forma directa a través de oportunidades de colaboración y formación en este apasionante conjunto de soluciones tecnológicas como es el IoT.
El final de Juego de Tronos nos ha dejado a muchos un vacío existencial y un duelo sin precedentes. Precisamente cuando entrábamos en la fase de aceptación, una nueva serie de los creadores de ‘El muro’, ‘Tensión con Corea del Norte’ y ‘La crisis de Venezuela’ llega a nuestras pantallas: ‘Game of Trump’.
El reciente veto de la administración Trump, la suspensión inmediata impuesta a la compañía Huawei y las reacciones de las compañías Google (EEUU), ARM (UK), Vodafone (UK) Panasonic (Japón) y Toshiba (Japón), generan muchas dudas sobre qué es lo que está pasando en el mundo de la tecnología debido a la dimensión geopolítica que está adquiriendo este campo. Y ahora nos preguntamos: ¿cómo nos puede afectar a corto y a medio plazo como ciudadanos españoles y de la Unión Europea?
En este sentido, desde el Área de Salud y Bienestar de CARTIF tratamos de reflexionar y examinar los alcances de esta nueva entrega de la serie Game of Trump y analizar las implicaciones que pueden tener estas tecnologías en los servicios socio-sanitarios y los efectos de esta nueva guerra en nuestra calidad de vida.
Temporada I: Los teléfonos móviles de Huawei y Google
Cuando pensamos en mejorar la calidad de vida de las personas con algún nuevo desarrollo tecnológico, siempre se tiene en cuenta que las personas buscan recibir servicios in situ, sin la necesidad de acudir físicamente a un sitio concreto. Por eso creemos que es indiscutible que el presente y el futuro de los servicios tecnológicos que recibimos pasan por la movilidad. En esto Huawei es uno de los actores más importantes, siendo el segundo fabricante de teléfonos del mundo en términos de ventas y popularidad entre un público que alaba especialmente la duración de sus baterías y la calidad de sus cámaras.
Los propietarios de los móviles de la compañía, que se cuentan por millones, se encuentran desconcertados tras la noticia de que Google ha roto relaciones con Huawei, dejando de proporcionar su software a la compañía china, que utiliza el sistema operativo Android de Google. Como resultado, la decisión de Google despoja a Huawei de la interfaz de usuario y de aplicaciones tan utilizadas como Google Play, Google Maps y Google Mail, entre otras.
Temporada II: La supremacía por el dominio del 5G
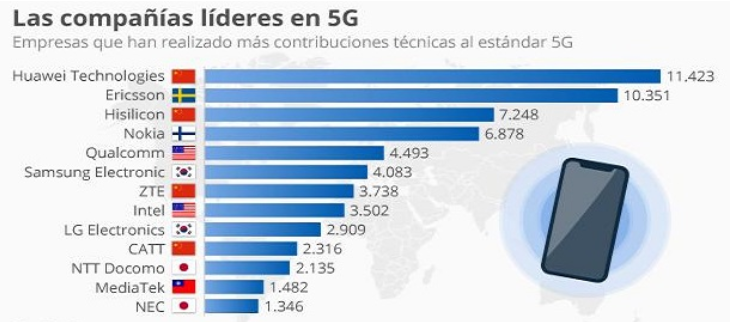
En este punto, los analistas indican que la batalla de los móviles, aunque es muy importante desde el punto de vista económico y comercial, no es el punto más significativo de la confrontación. Lo que está en juego es la supremacía en la tecnología 5G y en esto Europa tiene algo que decir (1) (2). Porque a pesar de que el líder en 5G es Huawei, hay dos compañías pertenecientes a países miembros de la comunidad europea, que están en segundo y cuarto lugar por sus aportes a la tecnología 5G, Ericcson y Nokia, mientras que la primera compañía de EEUU está en el quinto puesto. Parece ser que esta es la razón de la aparente pataleta que todos estiman que se terminará resolviendo con una negociación, porque el futuro es imparable. La administración Trump parece que preferiría frenar el despliegue de 5G a depender de las tecnologías chinas y europeas. Mientras tanto, los que creen en conspiraciones piensan que solo están presionando para tener acceso a las claves y así poder espiarnos.
Se estima que Huawei tendría en un futuro hasta el 30-35% de los estándares globales de 5G y detrás de estos estándares nos encontramos con las especificaciones internacionales diseñadas para impulsar la interoperabilidad de la tecnología. Pero, ¿qué es esto del 5G y la interoperabilidad? Y, sobre todo, ¿qué aplicaciones puede tener esto en el ámbito sanitario?
Temporada III: ¿Que es el 5G y como nos afecta?
El futuro se nos “promete” de color de rosa en el ámbito socio-sanitario gracias a la relación entre 5G y la interoperabilidad. Para esto tenemos que hablar de varias líneas de desarrollo tecnológico en las que estamos trabajando en CARTIF. Un ejemplo es el ‘internet de las cosas’ (IoT, por sus siglas en inglés), que no es otra cosa que una red de objetos físicos, máquinas, personas y otros dispositivos que permiten conectividad y comunicaciones para intercambiar datos por aplicaciones y servicios inteligentes. Estos dispositivos están compuestos por teléfonos inteligentes, tabletas, productos electrónicos de consumo, vehículos, robots sociales, robots de compañía y sensores que permiten que se controlen de forma remota a través de la infraestructura de red existente, creando oportunidades para la integración directa entre lo físico y los mundos digitales, lo que mejora la eficiencia, la precisión y los beneficios económicos.
La tecnología 5G es una tecnología diseñada para optimizar y mejorar las velocidades de conexión a internet, reduciendo considerablemente el tiempo de respuesta de la red y, por tanto, capaz de generar un abanico de oportunidades en todos los sectores digitales.
Tecnologías como móviles, Wi-Fi y Bluetooth habilitarán las comunicaciones de IoT a través de casos de uso y el 5G es la red que conectará estas cosas. Los dispositivos de IoT van a tener diferentes capacidades y demandas de datos y la red 5G será necesaria para poder dar soporte a todos. Con el ‘internet de las cosas’, vamos a ver servicios que solo necesitan una pequeña cantidad de datos y una larga duración de la batería, así como dispositivos que requieren altas velocidades y conectividad confiable. (1) (2)
Igualmente, desde nuestro escepticismo científico con respecto a la tecnología, es necesario remarcar que, como suele ser lo común en nuestras vidas, no todo es de color de rosa y somos conscientes de que va a haber aspectos a tener en cuenta para desarrollar una tecnología humanizada pensada solamente para mejorar considerablemente la calidad de vida de las personas. Por ejemplo, el aumento de velocidad y volumen de información implican mayores potencias a frecuencias más altas, y las consecuencias de la bio-compatibilidad de estas nuevas emisiones electromagnéticas es un campo de estudio a tener muy en cuenta. Por otro lado, está el aspecto, no menos importante, de la intimidad de los datos. Actualmente, gracias al Big Data y a la IA hay muchas compañías que tienen más información de los determinantes de nuestra salud que los sistemas socio-sanitarios a los que acudimos (y todos sabemos que el ámbito de los datos ‘es oscuro y alberga horrores’). Algunos piensan que este es el verdadero Trono del Hierro, y hay intereses para que, así como algunos nos ‘clusterizan’ como potenciales consumidores, nos quieren ‘clusterizar’ para manipularnos.
Temporada final IV: Hacer de la necesidad una virtud
El sistema socio-sanitario está en un estado crítico desde el punto de vista de la sostenibilidad, dado el envejecimiento de la población y los recortes en los presupuestos. Para hacer sostenible al sistema en su conjunto es necesario optimizar el binomio formado por los recursos necesarios y los servicios disponibles. Creemos que esto solamente se puede resolver por un uso adecuado, inteligente y centrado en la persona de la tecnología.
A nivel internacional, el envejecimiento de la población está afectando a todas las regiones y países del mundo que han alcanzado cierto nivel de desarrollo. No cabe duda que la prolongación de la vida es uno de los principales logros de nuestra sociedad, si bien es cierto, este logro también plantea retos importantes y oportunidades para nuestra economía, sistema sanitario y de protección social.
En España el envejecimiento demográfico es muy marcado y esto se evidencia especialmente en las regiones de mayor extensión, caracterizadas por una población rural en las que los jóvenes suelen emigrar a las ciudades. En estas zonas, el proveer servicios socio-sanitarios es más costoso y difícil por la falta de recursos. El compromiso social ha permitido transformar esta situación desfavorable en una virtud. Por ello, el sistema socio-sanitario de España puede ser considerado como uno de los mejores a nivel mundial, debido a los buenos resultados que presenta, combinando altos niveles de eficiencia y calidad con un coste comparativamente reducido.
En este aspecto, Castilla y León, según el Dictamen del Observatorio Estatal para la Dependencia realizado por la Asociación Nacional de directores y gerentes de Servicios Sociales correspondiente a la gestión del año 2018, es reconocida nuevamente (por duodécimo año consecutivo) como la comunidad autónoma que mejor está gestionando la Dependencia en España, volviendo a otorgar a Castilla y León un sobresaliente en su gestión de la aplicación de la Ley de Dependencia con un 9,3 sobre 10. La puntuación media de las comunidades españolas se sitúa en 5,04 puntos. Hablamos, por tanto, de un éxito sin precedentes.
El ecosistema de nuestra región está plasmado en los Clúster SIVI y BIOTECYL, formados por un gran número de organizaciones, tanto del ámbito público como del privado: sistemas sanitarios, agencias sociales públicas, asociaciones de pacientes, colectivos que brindan servicios, empresas de servicios, geriátricos, Universidades y Centros Tecnológicos, que vertebran el desarrollo y brindan los servicios para que podamos desarrollar nuestras vidas y las de nuestros seres queridos de una manera confortable teniendo en cuenta los parámetros de calidad, eficiencia e independencia.
Por todo esto, tenemos que ser conscientes de nuestra responsabilidad y, desde esta visión privilegiada, aprovechar las nuevas oportunidades para realizar una investigación científica y un desarrollo tecnológico humanizado con el único objetivo de mejorar la calidad de vida de las personas. En CARTIF creemos que ese es el punto de encuentro yallí estaremos aportando nuestra experiencia.