The main interest of this event “Robocup” is the advances in development of service robots, whose goal is to help humans in their daily life
At the end of July it took place in Nagoya Japan RoboCup 2017, and for the first time, I had the great opportunity to participate in this competition which brings together roboticists from around the world. Currently, RoboCup is the world’s largest robotic competition (this year participated almost 500 teams from 50 different countries), looking at a proud history of 20 years, starting from one league of football-playing robots, to now also cover many application areas of robots, such as rescue, logistics, and also service robots in people’s homes (RoboCup@Home).
As part of the SQPReL team, a very international team integrated by members of the L-CAS (University of Lincoln) and the LabRoCoCo (University of Rome “Sapienza”), I participated in the RoboCup at Home league. In that league the robots must be able to perform different housework in order to try to help humans in their daily life. Maybe one day in the future, most of the population will have one of these kinds of robots at home.
After 6 days of hard work in Nagoya added to the previous 2 months of preparation, the team was very proud to have achieved a good 3rd place in the RoboCup@Home Social Standard Platform League.
Nice but, what is actually the Robocup and what is it for?
RoboCup born as an international joint project to promote AI, robotics, and related fields. An attempt to foster AI and intelligent robotics research by providing standard problems. One of the effective ways to promote science and engineering research is to set challenging goals and these kind of competitions promote to compare developments and collaboration between the research community. Focusing on the RoboCup@Home, this league aims to develop service and assistive robots with high relevance for future domestic applications.
And when is the future? Are there no robots able to perform these tasks yet?
These kinds of robots have had a major presence in research centers in the recent years, such as Sacarino, the robot designed by CARTIF. However, there are few applications where robots are part of our daily life activities due to the difficulty to evaluate service robot applications and to obtain feedback mechanisms aimed at improving the general performance of the robot. Benchmarking in robotics has emerged as a solution to evaluate the performance of robotic systems in a reproducible way and to allow comparison between different research approaches, and here is where appears RoboCup@Home providing benchmarking through scientific competitions.
RoboCup@Home use a set of benchmark tests to evaluate the robot abilities and performance in a realistic non-standardized home environment setting (it changes every year and is not known until the day before the competition). Focus lies on the following domains:
Navigation: path-planning and safely navigating avoiding (dynamic) obstacles.
Mapping: building a representation of a partially known or environment.
Person Recognition: detecting and recognizing a person.
Person Tracking: tracking the position of a person over time.
Object Recognition: detecting and recognizing objects in the environment.
Object Manipulation: the ability of grasping, moving or placing an object.
Speech Recognition: recognizing and interpreting spoken user commands.
Gesture Recognition: recognizing and interpreting human gestures.
Cognition: understanding and reasoning about the environment.
How are those ability evaluated?
The competition is organized in several tasks (host a cocktail party, act as a waiter in a restaurant, follow verbal commands given by a human) that must be accomplished by the robots autonomously. These tasks are integrated tests, thus each test comprises a set of functionalities that must be properly integrated to achieve good performance. However, the scoring system allows for giving partial credit if only a part of the test is achieved.
In a future post I will explain more in detail the tasks that were carried out this year during the competition and our team’s experiences.
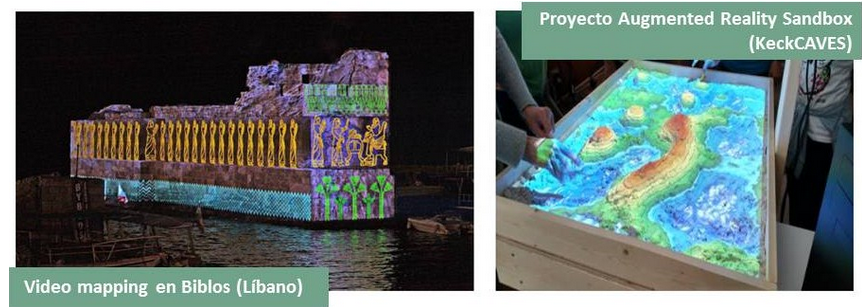
Recently, the Augmented Reality is becoming more and more common due to use of hand-held devices on our daily life such as smart phones, tablets and lately smart glasses. In this way, different applications, in many cases for leisure, like “Pokemon GO” or “Snapchat” image editor tool, have become popular this technology. But it is also includes for professional use on multitude of application areas.
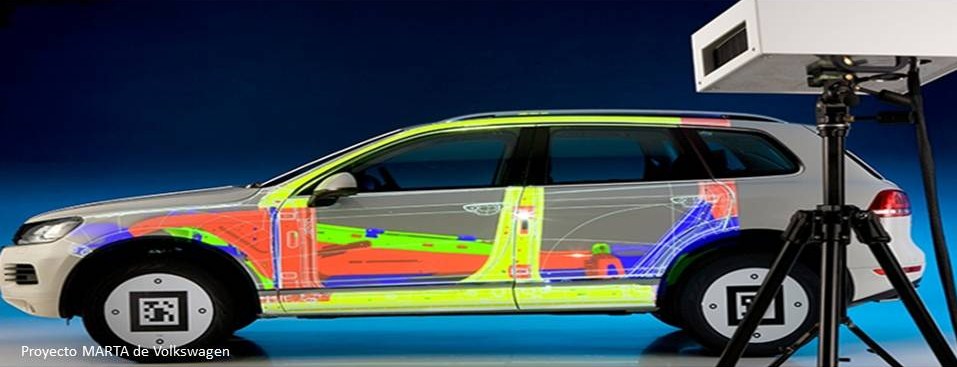
However, AR is neither a new technology nor it is subject to the use of smart phones orsmart glasses. Spatial Augmented Reality (SAR) augments real world objects and scenes without the use of special displays such as monitors or hand-held devices. The key difference in SAR is it makes use of fixed digital projectors to display graphical information onto physical object surface. The display is separated from the user of the system.
Because the displays are not associated with each user, SAR scales naturally up to groups of users, thus allowing for collocated collaboration between users. Furthermore, users avoid suffering eye strain due to use of smart glasses or be loaded with extra hand-held devices. For these reasons, aside from games and leisure applications, SAR has many potential applications in Industry.
In the automotive industry is used frequently during design stage projecting onto the car surface different options to choose the finish, or showing the employee how to perform the tasks of a specific reparation. Although, one of most implementations in this field is assistance in manual assembly tasks.
One or more optical devices (projectors) fixed provide immediate guidance for tasks step by step, projecting indications (text, images, animations) onto the work surface and in some cases directly on the parts on which a user is working. Spatial Augmented Reality can offer the following benefits:
• Reduces or eliminates the need for computer monitors and screens, as the instructions appear directly in the task space. • Reduces users’ cognitive load when following work instructions, specially for training new workers. • Reduces the need to interrupt workflows to consult information elsewhere because there is no is no need for “attention switching” between work instructions and the task at hand.
In addition of previously commented: • Workers avoid suffering eye strain due to use of smart glasses or be loaded with extra hand-held devices. • One SAR system allows groups of users and collaboration between them.
This technology combined with some validation system, such as tool localization system or hand tracker trough computer vision, to ensure and confirm correct execution of the tasks, provides feedback for process improvement, traceability and reduces errors. CARTIF is involved in some projects that apply the benefits of Spatial Augmented Reality and reduce as much as possible its most delicate features, such as ambient brightness, adaptation of projection to colour and shape of the pieces, or possible occlusions produced by workers.
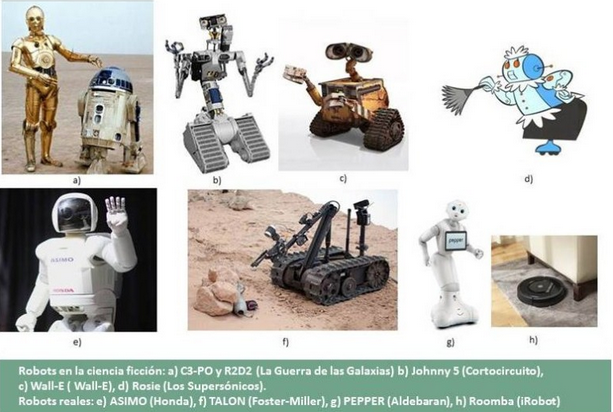
Robotics, mainly service robotics, has long been the subject of science fiction, with protocol droids designed to serve human beings like C-3PO from “Star Wars”, military robots like Johnny 5 from “Short Circuit”, robot cleaners like Wall-E, or maids like Rosie from “The Jetsons”. The service robotics is finally stepping out of science fiction and into service, in our homes for personal use like vacuum robots led by iRobot “Roomba”. And for professional use on multitude of application areas such as cleaning robot for public places, delivery robot in offices or hospitals, rehabilitation robot and surgery robot in hospitals, assistant robot.
What is the difference between service robots and industrial robots? The International Federation of Robotics (IFR) defines service robotics as “a robot that performs useful tasks for humans or equipment excluding industrial automation application”. While in general, industrial robots refer as robot arms used in manufacturing and service robots tend to be smaller and mobile, the definition has been dependent on the end application of the robot. Furthermore, contrary to their industrial counterparts, service robots do not have to be fully automatic or autonomous. In many cases these machines may even assist a human user or be tele-operated.
Market Data Since 2010, IFR has split their report into two sections, one for industrial robotics and one for service robotics. Until now, industrial robotics has been the dominant sector for robots, particularly in the automotive industry and consumer electronics. The industrial robotics sector is worth more than 29 billion euros in sales, software and service, even though there are only 1.5 million industrial robots in the world (compared to more than 10 million Roombas)! There has been steady growth in industrial robotics for the last five years and this trend shows no signs of slowing.
The IFR has tracked overall annual growth at around 11.5% so far, and projects more than 20% annual growth to come in the service robotics industry. But some niche areas have already demonstrated growth of between 150% (mobile platforms) and 650% (assistive technology) in the last year. The primary market areas for service robots so far have been in defence, field (agriculture and inspection), logistics and health/medical applications.
One of the new categories to emerge in the last year is the humanoid helper, kiosk robot or retail assistant.
Leading Countries The largest industrial robot manufacturing country is Japan with giants such as Fanuc, Yaskawa – Motoman, Kawasaki, OTC Daihen and others. Europe also has important players, mainly with ABB, Kuka and Universal Robots. In the US, there is Adept and others that are not as dominant in the market.
With respect to service robotics, the situation is the opposite, with the US clearly leading the way. The US approach is not to build humanoid robots but rather robots dedicated to one application. Robotic industry clusters have formed around MIT, Stanford and Carnegie Mellon universities of which many start-ups have formed from these institutions. In fact, IFR analyses also reveal that of all the enterprises engaged in the service robot market 15 percent are start-ups.
Europe’s Position in Robotics According to SPARC (partnership for robotics in Europe), Europe starts from a strong position in robotics, having a 32% of current world markets. Industrial robotics has around one third of the world market, while in the smaller professional service robot market European manufacturers produce 63% of the non-military robots. The European position in the domestic and service robot market represents a market share of 14% and, due to its current size, this is also a much smaller area of economic activity in Europe than the other two areas.
The European Commission submits Robotics in Europe is a rapidly developing field, with a high potential for supporting growth, creating jobs and solving societal challenges. Service robotics is also bringing unique solutions to key societal challenges from health and ageing society to environmental issues. The goal is to actively shape future developments in this area and enable our businesses and citizens to capture the resulting benefits.
CARTIF and Service Robotics CARTIFhas broad experience in the development of applied research projects in service robotics developing several different mobile robots with different degrees of autonomy. Some of these robots include teleoperated platform for pipe inspection, water reservoir cleaning and maintenance to more complex autonomous robots such as a museum tour guide, a robotic bellboy, a mechatronic head with realistic appearance and an all-terrain robot for assisting emergency squads on different situations.