El principal reclamo de esta cita es el avance en el desarrollo de los robots asistenciales, diseñados con el objetivo de ayudar a las personas en sus rutinas diarias
A finales de julio se celebró en Nagoya (Japón) RoboCup 2017, y tuve por primera vez, la oportunidad de participar en esta competición que reúne a personas relacionadas con la robótica de todo el mundo. Actualmente, RoboCup, que celebra este año su vigésima edición, es la mayor competición anual de robots del mundo. Este año han participado casi 500 equipos de 50 países diferentes y aunque en sus inicios únicamente contaba con liga de fútbol para robots, en la actualidad cubre la mayoría de áreas de la robótica: rescate, logística y robots de servicio en entornos domésticos (Robocup@Home).
Concretamente yo participé en la liga “RoboCup at home” como parte del equipo SPQReL formado por miembros de los grupos L-CAS (Universidad de Lincoln) y LabRoCoCo (Universidad de Roma “Sapienza”). Esta liga se basa en que los robots realicen una serie de tareas domésticas con el fin de ayudar a las personas en sus rutinas diarias. Quizás en un futuro no muy lejano, tengamos un robot de este tipo en nuestros hogares.
Después de 6 días de competición unidos a los 2 meses anteriores de preparación, el equipo acabó muy orgulloso de haber conseguido un tercer puesto en la “RoboCup@Home Social Standard Platform League”.
Muy bien pero, ¿qué es realmente esta competición y para qué sirve?
RoboCup nació como un proyecto internacional conjunto para promover la inteligencia artificial, la robótica y otros campos relacionados, a través del planteamiento de problemas comunes. Y buscando una forma de promover la investigación en ciencia e ingeniería estableciendo objetivos desafiantes y organizando este tipo de competiciones para comparar los desarrollos y favorecer la colaboración entre la comunidad investigadora. Centrándonos en RoboCup@Home, esta liga tiene como objetivo desarrollar robots de servicio y asistencia que proporcionen aplicaciones domésticas con gran relevancia en el futuro.
Y ¿cuándo es el futuro?, ¿no existen ya robots capaces de realizar estas tareas?
Este tipo de robots ha tenido una gran presencia en los centros de investigación en los últimos años y está empezando a evaluarse en entornos reales, como el diseñado en CARTIF, Sacarino. Sin embargo, todavía hay pocas aplicaciones en las que los robots formen parte de nuestras actividades cotidianas, y esto es debido en gran parte, a la enorme dificultad de obtener mecanismos de retroalimentación en estos entornos que permitan mejorar el rendimiento del robot. Como posible solución, ha surgido últimamente el benchmarking para evaluar el rendimiento de los sistemas robóticos de una manera reproducible y permitir la comparación entre diferentes enfoques de investigación. Y con ese fin aparece RoboCup@Home, tratando de proporcionar benchmarking a través de competiciones científicas.
RoboCup@Home utiliza un conjunto de pruebas de referencia para evaluar las capacidades y el rendimiento del robot en un entorno doméstico realista, no estandarizado (cambia cada año y no se conoce hasta el día anterior a la competición). La evaluación se centra en los siguientes campos:
Navegación: planificar rutas y navegar de forma segura evitando obstáculos (dinámicos).
Mapeo: construir una representación del entorno parcialmente conocido.
Reconocimiento de persona: detección y reconocimiento de personas.
Seguimiento de personas: localizar la posición de una persona y seguirla.
Reconocimiento de objetos: detectar y reconocer objetos en el entorno.
Manipulación de objetos: agarrar, mover o colocar un objeto.
Reconocimiento de voz: reconocer e interpretar comandos de voz del usuario.
Reconocimiento de gestos: capacidad de reconocer e interpretar gestos humanos.
Cognición: comprender y razonar a partir de la información dada.
¿Cómo se evalúan esas capacidades?
La competición consiste en varias tareas complejas (atender las peticiones de los invitados a una fiesta, actuar como camarero en un restaurante, seguir órdenes verbales dadas por un usuario) que deben realizar los robots de forma totalmente autónoma. Estas tareas son pruebas combinadas, por lo que cada prueba comprende un conjunto de las funcionalidades previas que deben integrarse para poder completarlas, aunque el sistema de puntuación también valora los logros parciales.
En en un futuro post veremos más en detalle las tareas que se realizaron este año durante la competición y las experiencias de nuestro equipo.
En los últimos tiempos el uso de la Realidad Aumentada (AR, Augmented Reality) se está haciendo cada vez más habitual aprovechando la utilización masiva de dispositivos móviles en la vida cotidiana como smartphones o tablets, y la aparición de otros nuevos como las smart glasses. De este modo, diferentes aplicaciones generalmente de ocio como “Pokémon GO”, o los filtros de edición de imagen de “Snapchat” han terminado de popularizar esta tecnología, aunque sus aplicaciones también se extienden al mundo profesional.
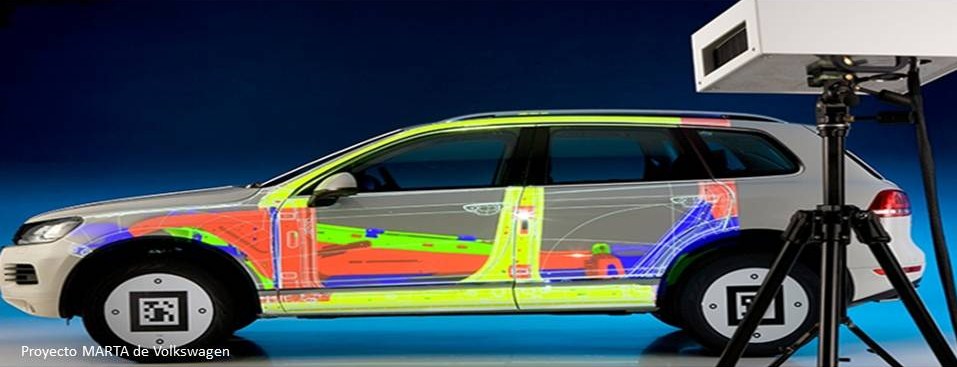
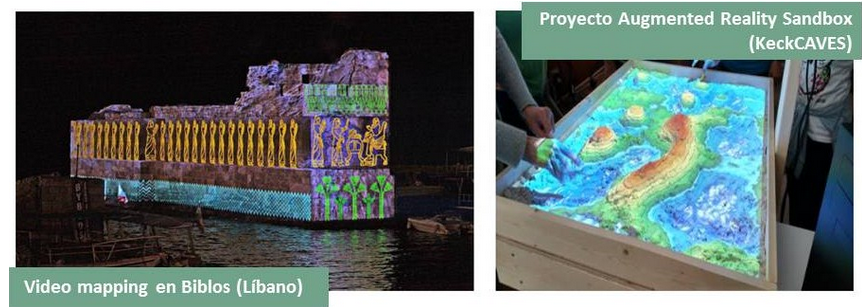
Sin embargo, la tecnología AR ni es nueva, ni está supeditada al uso de móviles o gafas inteligentes. Existe una técnica denominada Realidad Aumentada Espacial (SAR, Spatial Augmented Reality), que se distingue por la no utilización de dispositivos como interfaz de usuario. Como tecnología de AR, su principal función es añadir información digital a la realidad, pero en este caso la información se muestra directamente sobre el objeto físico, normalmente mediante proyectores digitales.
Debido a que la superficie de proyección no está asociada al usuario, la SAR es una buena herramienta para el trabajo colaborativo porque puede ser utilizado por varias personas a la vez. Del mismo modo, el usuario no debe someterse al desgaste visual que puede producir el uso de pantallas o gafas especiales o cargar con dispositivos móviles. Estos aspectos hacen que la SAR, además de otras aplicaciones como juegos, tenga buena aplicación en la industria.
En la industria del automóvil es frecuente su uso en fases de diseño, proyectando sobre el propio coche diferentes opciones de acabado, o de mantenimiento, ofreciendo información al mecánico de la mejor forma de acometer una reparación.
SAR en puestos de ensamblaje
Dentro de la industria, una de las mayores aplicaciones que tiene la SAR, es la de asistencia en los puestos de montaje manual. Por medio de uno o varios proyectores situados en el puesto de montaje, se puede guiar al trabajador en la secuencia de tareas a realizar, mostrando la información sobre la propia mesa de trabajo o sobre la misma pieza. Las ventajas que ofrece esta tecnología son principalmente:
• Reduce o elimina la necesidad de monitores y pantallas, al mostrar las instrucciones directamente en el espacio de trabajo. • Disminuye la carga cognitiva de los usuarios cuando se siguen las instrucciones de trabajo, siendo especialmente adecuada para entrenamiento y formación de nuevos trabajadores. • Reduce descuidos al no haber necesidad de «cambiar la atención» entre instrucciones de trabajo y la tarea a realizar. • El trabajador no debe cargar con ningún tipo de dispositivo o someterse al desgaste visual que puede producir el uso de gafas especiales. • Varios trabajadores pueden trabajar a la vez con un único sistema de SAR instalado.
Este tipo de aplicación combinada con algún sistema que permita la validación de la ejecución de la tarea (como puede ser la localización de herramienta o el seguimiento de las manos del trabajador mediante técnicas de visión artificial) permite confirmar la correcta ejecución de las operaciones mejorando la trazabilidad de las operaciones y la reducción de errores.
En CARTIF estamos trabajando en varios proyectos con estas técnicas de SAR, desarrollando e integrando sistemas asistivos en operaciones de ensamblaje, aprovechando las ventajas que ofrece esta tecnología y reduciendo lo máximo posible los puntos más delicados que tiene, como la luminosidad del entorno, la adaptación de la proyección al color y forma de las piezas, o posibles oclusiones que puede producir el propio trabajador al realizar las tareas.
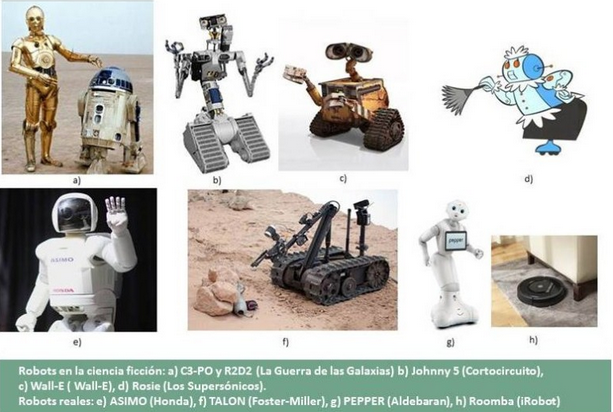
La robótica, principalmente la robótica de servicios, ha sido durante años únicamente objeto de la ciencia ficción. Droides de protocolo diseñados para servir a los seres humanos como el C3PO de “La Guerra de las Galaxias”, robots con fines militares como el Johnny 5 de “Cortocircuito,” robots de limpieza como Wall-E, o asistentes del hogar como la Rosie de Los Supersónicos.
Sin embargo, los robots de servicios finalmente han dado el salto desde la ciencia ficción a nuestra vida cotidiana. Tanto para uso personal, liderados por el robot aspirador Roomba de iRobot, como en el ámbito profesional en multitud de áreas de aplicación: robots de limpieza en lugares públicos, robots logísticos en industria u hospitales, robots de rehabilitación y cirugía en hospitales, robots asistentes…
¿Cuál es la diferencia entre robots de servicios y robots industriales? La Federación Internacional de Robótica (IFR) define la robótica de servicios como «robot o equipamiento que realiza tareas útiles para el ser humano excluyendo aplicaciones para automatización industrial». En general, los robots industriales se refieren a los brazos robóticos utilizados en la fabricación. Suelen ser de gran tamaño, con funcionalidades similares entre sí y desempeñan tareas repetitivas. Sin embargo, la definición de los robots de servicios no es tan clara debido a su amplio rango de utilidad. Tienden a ser más pequeños y móviles pero sus funcionalidades varían dependiendo de su aplicación final. Además, contrariamente a sus homólogos industriales, los robots de servicio no tienen que ser completamente autónomos; en muchos casos, pueden ser equipamiento de apoyo al ser humano o máquinas tele-operadas.
La Robótica en el mercado Desde 2010, IFR divide su Informe Anual Mundial de Robótica en dos secciones, una para la robótica industrial y otro para la robótica de servicios. Hasta ahora, la robótica industrial ha sido el sector dominante para los robots, especialmente en la electrónica de consumo y la industria de automoción. El sector de la robótica industrial supone más de 29 M€ en ventas, software y mantenimiento, a pesar de que hay “sólo” 1,5 millones de robots industriales en el mundo (en comparación con más de 10 millones de Roombas). En los últimos cinco años ha habido un crecimiento constante en la robótica industrial y esta tendencia no muestra signos de desaceleración.
Por su parte, la robótica de servicios ha seguido un crecimiento anual global en torno al 11,5%, y se estima un crecimiento anual de más del 20%. En el último año, algunas áreas ya han demostrado un crecimiento de entre el 150% (plataformas móviles) y el 650% (tecnología de asistencia).
Las principales áreas de mercado de robots de servicio hasta ahora han sido defensa, agricultura, logística y aplicaciones médicas, pero continuamente van apareciendo nuevas categorías. Una de las que ha cobrado gran importancia en el último año es el ayudante humanoide o robot asistente.
Países dominantes El mayor fabricante de robots industriales es Japón, con gigantes como Fanuc, Yaskawa – Motoman, Kawasaki y OTC Daihen. Europa también tiene empresas dominantes, sobre todo con ABB, Kuka y Universal Robots. Mientras que en los Estado Unidos, se encuentra Adept y otros que no son tan importantes en el mercado global.
Con respecto a la robótica de servicios, la situación es la opuesta, donde los EE.UU. guían claramente el camino. Su enfoque no es construir robots humanoides, sino más bien robots dedicados a una sola aplicación y lo han conseguido formando grupos industriales en torno a las universidades MIT, Stanford y Carnegie Mellon de las cuales han surgido muchas empresas de nueva creación. De hecho, análisis del IFR revelan que de todas las empresas dedicadas a la robótica de servicios en la actualidad, más del 15% son de nueva creación.
Robótica en Europa Según SPARC (Asociación para la robótica en Europa), Europa se encuentra en una buena posición en robótica copando un 32% del mercado mundial actual. La robótica industrial supone alrededor de un tercio del mercado mundial, mientras que en el mercado de los robots de servicios profesionales los fabricantes europeos producen el 63% de los robots no militares. La posición europea en robots de servicios domésticos representa una cuota de mercado del 14%.
La Comisión Europea sostiene que la Robótica en Europa es un campo en rápido desarrollo, con un alto potencial para apoyar el crecimiento, la creación de puestos de trabajo y la solución de los retos sociales. La robótica de servicios también está aportando soluciones únicas a los principales retos sociales de la salud y el envejecimiento de la sociedad, por lo que su objetivo es dar forma a los futuros desarrollos de forma activa en esta área y permitir que nuestras empresas y ciudadanos se beneficien de los resultados.
CARTIF y la Robótica de Servicios CARTIF tiene una amplia experiencia en el desarrollo de proyectos de investigación aplicada en robótica de servicios. Se han desarrollado diferentes robots móviles con distintos grados de autonomía incluyendo plataformas teleoperadas para la inspección, limpieza y mantenimiento de tuberías y depósitos de agua, además de otros robots autónomos más complejos como robots logísticos, un guía de museo, un botones para entornos hoteleros, una cabeza mecatrónica con apariencia realista o un robot todo terreno para ayudar a los equipos de emergencia en diferentes situaciones.