Imagina vivir en un edificio donde la temperatura es tan constante como la receta secreta de la abuela. ¿Cómo lograrlo? Aquí es donde entran en escena los Materiales de Cambio de Fase (PCM) y las bombas de calor alimentadas por energía renovable, el dúo dinámico de la eficiencia energética.
Los PCM son como los maestros zen de la temperatura, manteniendo la calma y equilibrio en el ambiente al almacenar y liberar calor de manera constante. Cuando se combinan con bombas de calor que operan con energía solar o geotérmica, proporcionan una clara garantía de que tu hogar mantenga una temperatura constante.
Aquí tienes algunas razones prácticas para enamorarse de esta combinación:
Estabilidad térmica: gracias a los PCM, olvídate de los cambios bruscos de temperatura. Es como tener un termostato mágico que siempre encuentra el punto perfecto.
Ahorro energético. las bombas de calor, impulsadas por energía renovable, son como magos que convierten la luz del sol o el calor de la Tierra en ahorros reales en tu factura de energía. Más eficiencia, menos gastos.
Ecofriendly: al unir fuerzas, PCM y bombas de calor son como compañeros de viaje que cuidan el planeta. Contribuyen a reducir la huella de carbono, haciendo que tu hogar sea más verde que un prado en primavera.
Ahora, hablando de innovación, entra en escena el proyecto europeo ThumbsUp. Este proyecto busca superar las limitaciones de las tecnologías convencionales mediante el desarrollo de materiales innovadores, y, en este sentido, el edificio CARTIF III será el laboratorio de pruebas, mostrando cómo esta tecnología puede transformar un edificio en un oasis de eficiencia energética.
En resumen, la combinación de PCM y bombas de calor es una solución efectiva para una gestión térmica sencilla. Prepárate para despedirte de los extremos y dar la bienvenida a un hogar siempre acogedor.
Cuando un proyecto finaliza, es el momento de recapitular, de recopilar toda la información y la experiencia adquirida durante el proceso. A lo largo de los tres años y medio de trabajo en el proyecto CAPRI, ha habido mucho tiempo para hacer cosas, para obtener muy buenos resultados o para sentirse mal porque muchas veces nada parece funcionar bien a la primera.
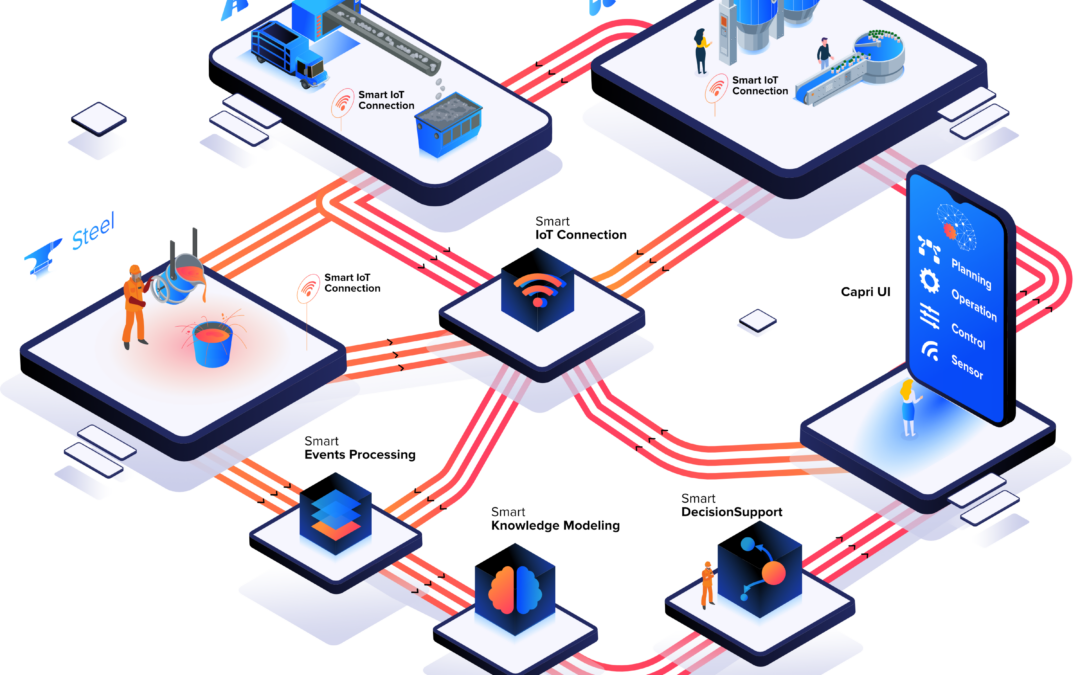
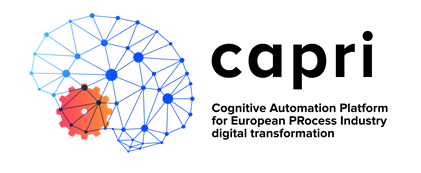
El proyecto CAPRI finalizó en septiembre de 2023 y logró sus principales objetivos definidos al inicio, que fueron impulsados por la necesidad de ayuda en la transformación digital de la industria europea de procesos mediante la investigación, desarrollo y prueba de una plataforma de automatización cognitiva, CAP, que integra 19 soluciones cognitivas diferentes definidas en cada una de las tres plantas piloto del proyecto. Esta plataforma se ha diseñado para lograr el objetivo final de obtener reducciones en el uso de materias primas, consumo de energía y huella de CO2. Tras finalizar el proyecto, se ha demostrado que las reducciones se han logrado gracias a la estrecha colaboración de los doce socios involucrados, procedentes de siete países diferentes. La plataforma cognitiva y las soluciones se implementaron en tres sectores importantes de la industria de procesos: fabricación de asfalto, producción de lingotes y barras de acero y producción de tabletas en la industria farmacéutica.
Por ejemplo, en la planta piloto de asfalto de EIFFAGEInfraestructuras, las soluciones cognitivas estaban relacionadas con los cuatro niveles de automatización, desde sensores hasta planificación, abarcándolos todos. El prototipo final demostrado bajo operación real de la planta de asfalto incluyó tecnologías muy diferentes como visión por computadora, análisis de vibraciones, redes neuronales o modelos matemáticos para la parametrización de los datos existentes para predecir los indicadores clave de rendimiento (consumo específico de energía por tonelada de mezcla de asfalto o la cantidad final de materias primas utilizadas).
Las soluciones cognitivas desarrolladas, como el control cognitivo del tambor secador o los nuevos sensores, aseguran la calidad de los productos y la producción en tiempo real, reduciendo el consumo de energía y materias primas utilizadas. Antes del proyecto, el control de los materiales utilizados se basaba en estimaciones y ahora, con el modelo matemático para el balance de masas y los nuevos sensores, los operadores de la planta pueden recibir una información en tiempo real que no tenían antes.
Los resultados esperados de cada solución cognitiva se definieron durante las primeras etapas del proyecto para verificar las mejoras de cada una durante el período de validación del proyecto. El proyecto CAPRI ofrece soluciones innovadoras que tienen el potencial de transformar industrias e impulsar el progreso. Destaca el enfoque del proyecto en desbloquear nuevas posibilidades y capacitar a varios sectores con avances de vanguardia gracias a los resultados explotables clave generados.
Respecto a estos resultados, dentro del caso de uso de asfalto, se incluyeron como resultados explotables tres soluciones: un sensor para medir el polvo aspirado en línea dentro de un tubo, la cantidad de betún presente en el asfalto reciclado y un sistema de mantenimiento predictivo del colector de polvo de la planta basado en sensores cognitivos y conocimientos expertos. El caso de uso del acero generó dos resultados explotables: un sensor cognitivo de solidificación de acero para procesos de colada continua y un seguimiento de productos de acero. El caso de uso de la industria farmacéutica tiene dos resultados explotables: un sensor cognitivo para la calidad de los gránulos y un sensor de atributos de calidad.
El proyecto también generó algunos resultados explotables clave transversales útiles para cualquier tipo de industria: la arquitectura técnica de la plataforma de automatización cognitiva o CAP, y otro relacionado con los datos abiertos generados, mostrando el compromiso del proyecto CAPRI con la ciencia abierta y los principios FAIR a través de la generación de más de 50 activos compartidos en plataformas abiertas, como Zenodo.
Los principales objetivos de la propuesta fueron la reducción del uso de materias primas, energía y huella de CO2. Podemos decir con orgullo que logramos esos objetivos, como se puede ver en la tabla resumen de KPIs después de CAPRI:
KPI Objetivo
Después de CAPRI
5% – 20% Ahorro de materias primas
10-20%
5% reducción del consumo de energía
3-16,75%
5% reducción de la huella de carbono de CO2
3-16,75%
Como ingeniero, cuando un proyecto finaliza a tiempo, y con estos muy buenos resultados, cuando su proyecto ha contribuido a mejorar la industria, sin dañar nuestro medio ambiente, uno se siente mejor y todos los sacrificios, horas extras y críticas negativas valieron la pena.
En el vibrante panorama de la innovación y la investigación y desarrollo (I+D), donde las ideas florecen y la creatividad se encuentra con la tecnología, el desarrollo de negocio emerge como el puente esencial entre el potencial teórico y la realización práctica. En el Centro Tecnológico CARTIF, reconocemos que este puente no es meramente un paso adicional en el proceso de I+D+i, sino un componente integral que determina el éxito y la sostenibilidad de nuestras innovaciones en el mercado.
El desarrollo de negocio en el contexto de I+D+i no se limita a la búsqueda de oportunidades comerciales para productos o servicios existentes; es una integración estratégica que comienza desde la concepción misma de la investigación. Significa alinear desde el inicio los objetivos de la investigación y el desarrollo con las necesidades del mercado, identificando nichos donde la innovación puede no solo entrar sino también expandirse y dominar.
La valorización de la innovación, proceso en el cual el conocimiento tecnológico se transforma en aplicaciones de mercado viables, requiere una comprensión profunda del ecosistema empresarial. En CARTIF, nos esforzamos por entender las dinámicas de mercado, las tendencias de la industria y las necesidades de los consumidores. Este enfoque nos permite no solo anticipar los cambios sino también ser parte de la fuerza que los impulsa, asegurando que nuestras innovaciones sean tanto relevantes como revolucionarias.
El desarrollo de negocio también implica la creación y el mantenimiento de una red sólida de contactos, incluyendo socios industriales, académicos y financieros. Estas colaboraciones son cruciales para el éxito de la I+D+i, ya que proporcionan los recursos, el conocimiento y el capital necesarios para llevar las innovaciones del laboratorio al mercado. En CARTIF, valoramos estas colaboraciones como el núcleo de nuestra estrategia de desarrollo de negocio, fomentando un ecosistema donde la innovación puede prosperar.
Al encaminarnos a crear modelos de negocio para las empresas basados en los resultados que les transferimos, no solo aportamos valor a nuestro trabajo sino que también maximizamos las posibilidades de negocio para nuestros clientes. Este enfoque dual asegura que no solamente estamos transfiriendo tecnología, sino que estamos activamente participando en la creación de oportunidades económicas sostenibles para las empresas que colaboran con nosotros.
«La creación de estos modelos de negocio es, en esencia, una función clave del desarrollo de negocio».
Borja Fernández Villar. Responsable de Desarrollo de Negocio de CARTIF
Una de las principales ventajas de este enfoque integrado es la minimización del riesgo para las empresas que invierten en nuestra tecnología. Al ser capaces de generar modelos de negocio de manera directa, ofrecemos a nuestros clientes un camino claro hacia el retorno de su inversión. Esta claridad y seguridad en la inversión es esencial para fomentar una cultura de innovación audaz, donde las empresas se sienten empoderadas para adoptar nuevas tecnologías sabiendo que tienen un modelo de negocio sólido detrás que respalda su éxito.
El desarrollo de negocio es, sin duda, el catalizador que permite que las ideas de innovación se conviertan en realidades comerciales exitosas. En el Centro Tecnológico CARTIF, entendemos que la integración de estrategias de desarrollo de negocio en el proceso de I+D+i no es solo una opción, sino una necesidad para garantizar que nuestras innovaciones no solo sean pioneras, sino también impactantes y sostenibles en el mercado. Al poner el desarrollo de negocio en el corazón de nuestra estrategia de I+D+i, nos aseguramos de que el puente entre la teoría y la práctica no solo sea sólido sino también transitado, llevando la innovación desde el concepto hasta la comercialización con éxito.
¿Sabías que aproximadamente pasamos el 90% de nuestro tiempo en el interior de los edificios? ¿Y que son responsables de más del 40% del consumo de energía en la Unión Europea? Esos lugares donde desarrollamos nuestra principal actividad son el núcleo de nuestra economía y sociedad, pero, ¿cómo de preparados están para los retos y oportunidades de hoy y mañana?
El parque inmobiliario juega un papel clave en la transformación de los lugares donde trabajamos, vivimos y nos relacionamos. Las acciones promovidas por la Unión Europea con el pacto verde (Green Deal) o la ola de renovación (Renovation Wave), han tratado de impulsar este cambio. Además, desde la revisión de 2018 de la directiva Europea de Eficiencia Energética de los edificios (EPBD)1 –que, por cierto, acaba de ser de nuevo actualizada – el potencial de las tecnologías inteligentes toma un papel fundamental. La digitalización parece, por tanto, clave para conseguir la transformación de los lugares donde vivimos, para potenciar y contribuir a la transición energética.
Es por ello que en la revisión de la directiva EPBD de 2018 se introdujo también como esquema opcional el indicador SRI (Smart Readiness Indicator)2, cuyo objetivo es medir el nivel de preparación inteligente de los edificios. Este esquema nace en un primer estudio técnico para la Comisión Europea (CE) en 2017/18 y es revisado en una posterior iteración en 2019/20, asociando una metodología de cálculo3. Es en el año 2020 cuando se regula por primera vez su implementación4, y desde 2021 existe un equipo de soporte que ofrece asistencia para su adopción. Dado su carácter no obligatorio, la decisión sobre su implementación reside en los países miembro de la Unión Europea, y por ello se encuentra en fase de prueba voluntaria en algunos países, entre los que se encuentra España.
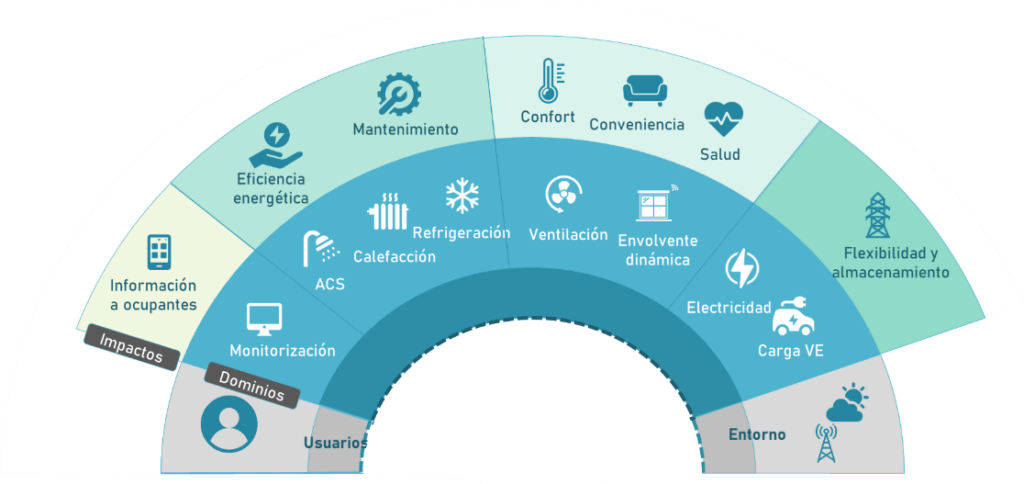
¿Y qué nos permite conocer este indicador? El SRI hace una evaluación del edificio en términos de tres funcionalidades clave totalmente alineadas con el concepto de inteligencia: (1) cómo responde el edificio a las necesidades de los ocupantes, (2) el uso de estrategias para mejorar la eficiencia energética y el rendimiento, y (3) su capacidad para interactuar con el exterior y de reaccionar ante el entorno. Para ello, se propone un catálogo de servicios clasificados en nueve dominios técnicos, evaluados en base a siete impactos.
Veamos el funcionamiento con un ejemplo: se desea mejorar el comportamiento del sistema de calefacción del edificio. Puede que no sea posible realizar un control automático, bien éste sea central, o incluso más avanzado, permitiendo actuar por sala. En base al nivel de funcionalidad elegido, cuanto mayor sea la capacidad ofrecida, la implementación será evaluada como más inteligente y, por tanto, capaz de proporcionar impactos más beneficiosos a los usuarios en términos de eficiencia energética, confort, conveniencia o salud. Dichos impactos a su vez tendrán una puntuación superior a la obtenida por servicios con una funcionalidad inferior. El método de cálculo se puede consultar en el informe técnico final de la CE citado anteriormente, existiendo además materiales de apoyo, así como ejemplos y herramientas digitales para hacer dicho proceso más sencillo5.
Figura 1. Dominios y categorías de impacto del SRI
La implantación de las tecnologías inteligentes puede ayudarnos a conseguir edificios mejores en términos energéticos, más sanos, confortables y comprometidos con el medio ambiente. Sin embargo, aspectos como la falta de conocimiento y concienciación al respecto, la necesidad de información precisa para contextualizar dichas recomendaciones o la falta de confianza por parte de los usuarios en los beneficios que pueden brindar las soluciones inteligentes, hace que su adopción no sea tan sencilla. Existen numerosos proyectos que pretenden dar apoyo a las actividades de aceptación de dicha iniciativa como es el caso de SMARTeeSTORY o BuildON, en los que participa CARTIF, donde se intentará dar un paso más y ofrecer soporte a los usuarios finales en base a qué medidas adoptar para la transformación inteligente del edificio y su mejora en el dominio/impacto deseado. Esperamos con ello poder ayudar a que, en un mañana no tan lejano, los edificios en los que nuestro tiempo avanza se conviertan el lugar donde nos gustaría vivir.
3 European Commission, Directorate-General for Energy, Verbeke, S., Aerts, D., Reynders, G. et al., Final report on the technical support to the development of a smart readiness indicator for buildings – Final report, Publications Office, 2020, https://data.europa.eu/doi/10.2833/41100
¿Y si tuviéramos una herramienta que pudiéramos llevar en el bolsillo y que nos permitiera controlar la calidad de los productos alimenticios en cualquier punto de su producción?
Pues muy señor@s mi@s, ¡¡¡la tenemos!!! Parece un anuncio vendiendo la panacea, lo sé, pero es que no voy más allá de la realidad… hablo de la tecnología de Espectroscopia de infrarrojo cercano, conocida como NIRS (Near Infrared Spectroscopy, por sus siglas en inglés), que lleva en nuestras vidas más de 30 años y, por fin, estamos apuntando bien aplicándola en lugares y momentos que nos pueden sacar de muchos aprietos en nuestro día a día dentro del sector agroalimentario, ¡pues démosle el trato que se merece!
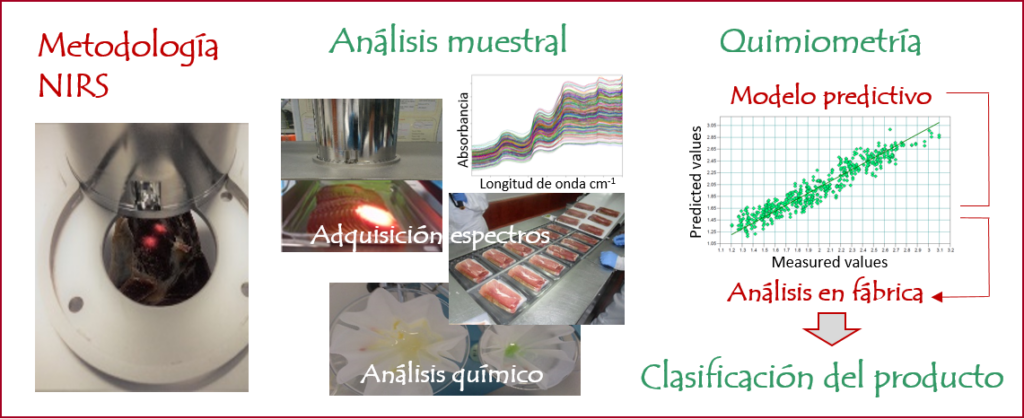
NIRS portátil con muestra del proyecto CARNIQUS
Bueno, siendo rigurosos con esta tecnología, el análisis de infrarrojo cercano es una técnica instrumental en el campo de la espectroscopia molecular, que necesita del tratamiento quimiométrico de los datos obtenidos, debido a que la señal obtenida en el infrarrojo cercano es tan compleja que las bandas del espectro son difíciles de interpretar. Y aquí empezamos con los términos complicados… ¿¿quimiometría?? Pues sencillamente, técnicas estadísticas a las que hay que aplicar la lógica, un buen sentido común y mucha química!!!
La metodología seguida empleando la espectroscopía NIR nos conduce a través de análisis dirigidos a la caracterización de los productos mediante la cuantificación de parámetros analíticos que nos resulten de interés o que sean críticos para llevar un control de calidad tanto de las materias primas como de los productos durante su procesado o del producto final.
Además, otra de las aplicaciones de esta técnica es que es capaz de discriminar los productos siguiendo los estándares de calidad marcados por la propia empresa en cada momento del procesado. En este caso, se trata de modelos de clasificación (no dirigidos) que te permiten identificar o detectar que algo ha cambiado en el producto, pudiendo deberse a algún cambio en las materias primas (diferencias en la composición nutricional), cambios entre lotes (que pueden afectar al producto final), problemas en producción (dosificaciones de los ingredientes) e incluso si hay alguna adulteración en algún ingrediente empleado o una posible contaminación en su elaboración.
La verificación de un proceso productivo depende generalmente de los resultados obtenidos en un laboratorio a través de métodos analíticos largos y costosos, lo que implica tiempos de respuesta “no inmediatos”. La tecnología NIRS es una herramienta de análisis que nos permite llevar la trazabilidad en cualquier punto y a lo largo de toda la cadena de producción y, por tanto, nos proporciona importantes ventajas en la toma de decisiones o detección de problemas in situ.
Hoy en día, ya se dispone de equipos portátiles no mucho mayores que un smartphone, capaces de analizar multitud de productos con solo seleccionar el modelo adecuado en cada momento. Aunque, todo hay que decirlo, estos modelos han de ser meticulosamente desarrollados por personal experto en la tecnología y para eso estamos aquí los centros de investigación, como CARTIF.
Ya son casi 15 años desde que me crucé con esta tecnología gracias a una colega que trabajaba con ella y fue por puro convencimiento que tomé el testigo de esta gran técnica con la que sigo avanzando, aprendiendo y trabajando, para que las empresas, especialmente el sector agroalimentario, la conozcan y se aprovechen de todas sus bondades.
Siempre he pensado que las siglas I+D+i respondían al mayor o menor riesgo de realización de las actividades asociadas y de ahí que las dos primeras fueran mayúsculas y la tercera minúscula.
Después de 15 años trabajando en un centro tecnológico me doy cuenta de que el hecho de hacer referencia a la investigación y al desarrollo en mayúsculas y la innovación en minúscula afecta a la impresión que se tiene sobre ese tipo de actividades. Psicológicamente lo que se tiene interiorizado, bajo mi punto de vista, es que la innovación es menos importante que la investigación y el desarrollo.
Partiendo de la base de que la innovación es aquella actividad con riesgo que se realiza y cuyo resultado está más cerca de su implementación y, por tanto, aumentan las posibilidades de generar valor, competitividad y en definitiva prosperidad, creo que la innovación se merece, como mínimo, escribirse también en mayúsculas.
Asimismo, la experiencia trabajando en CARTIF también me ha hecho reflexionar sobre el resultado de esa suma de tres variables: I+D+i, sobre la variable dependiente de la ecuación… Para mí el resultado es claro generación de IMPACTO. Y es impacto en una doble dirección: la investigación y desarrollo generan impacto sobre el estado de la técnica que no genera la innovación y que se materializa, principalmente en artículos y patentes, que cualquiera en cualquier parte del mundo puede aprovechar. La innovación genera impacto en el mercado dado que, en palabras del profesor Xavier Ferrás, «la innovación es la explotación con éxito de una idea con riesgo, que se materializa principalmente en beneficios y crecimiento, localizado en un punto concreto».
«la innovación es la explotación con éxito de una idea con riesgo, que se materializa principalmente en beneficios y crecimiento, localizado en un punto concreto».
Xavier Ferrás.
Los centros tecnológicos somos entidades creadas para asumir tareas con riesgo y crear conocimiento tecnológico, pero sobre todo somos entidades creadas para valorizar ese conocimiento tecnológico y aplicarlo en el mercado y que se transforme en beneficio económico y social.
Es por ello importante para un centro tecnológico trabajar en que la i+d genere innovación, tratando de valorizar a medida los resultados para que el mercado interiorice y entienda el resultado generado y lo explote con éxito. Es importante apoyarse en colaboradores que agilicen los procesos de obtención de resultados y que, sobre todo, agilicen el proceso de transformar la i+d en I. En definitiva, se trata de colaborar para ganar valor. Se trata además de ayudar a construir sistemas de innovación eficientes, ajustando la obtención de resultados con riesgos a las exigencias del mercado desde el inicio de la concepción del resultado para que no exista un desfase temporal y/o tecnológico entre la generación y la explotación que cargan a los sistemas de innovación de ineficiencias y roturas de sus engranajes. Es importante contextualizar el marco de actuación a nivel global para avanzar en el estado de la técnica ganando posiciones, pero actuar en local en los procesos de valorización y transferencia, para que el beneficio económico repercuta en nuestros sistemas locales. Todo ello es clave para que los ecosistemas de innovación nazcan, aumenten sus capacidades y se consoliden en el tiempo. Todo ello es clave para que la innovación llame a más innovación.