In 2020, Spain took a firm step towards decarbonisation with the publication of the National Integrated Energy and Climate Plan (PNIEC). Among the measures highlighted, renewable hydrogen or green hydrogen, i.e., hydrogen generated in electrolysers powered by renewable energy, emerged as a key solution to reduce emissions in various sectors.
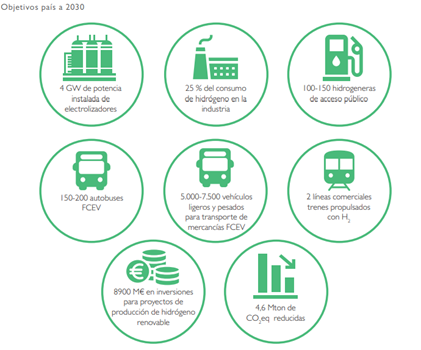
One of these measures was the publication of a Hydrogen Roadmap, which sets out concrete strategies to avoid CO2 emissions through hydrogen, replacing fossil fuels in uses such as heat generation for industry or housing, or as fuel in means of transport such as lorries or ships. It also sets targets for hydrogen use by 2030, including having 4 GW of installed capacity of electrolysers and replacing 25% of the hydrogen consumed in industry with green hydrogen.
Fig.1. Objectives of the Hydrogen Roadmap. Source: Hydrogen Roadmap
Thanks to these policies, both both local and international companies will start to invest in hydrogen, proposing projects with electrolysers of up to 100 MW to supply peninsular consumers. European programmes will help finance these projects, although they will also depend to a large extent on private investment.
European Union policies on hydrogen
The European Comission adopted its hydrogen strategy in July 2020, calling for a total of 40 GW of electrolyser capacity for the whole region by 2030, and hydrogen consumption accounting for 24% of all final energy by 2050. In addition, through other policies such as the “Fit for 55” package or RePowerEU, it will set an objective of 10 Mt of hydrogen generation and 20 Mt of consumption; 75% substitution of fossil fuels with renewables (including hydrogen) in industry and 5% in transport; and construction of up to 28,000km of hydrogen exchange pipelines, all by 2030.
Programmes are also being created to finance the installation of hydrogen infrastructure, such as “Hy2Tech” or “Hy2Infra”, which, between different calls for public and private funding, have raised more than 38 billion euros; as well as institutions designed to vridge the price gap that green hydrogen currently has, such as the European Hydrogen Bank.
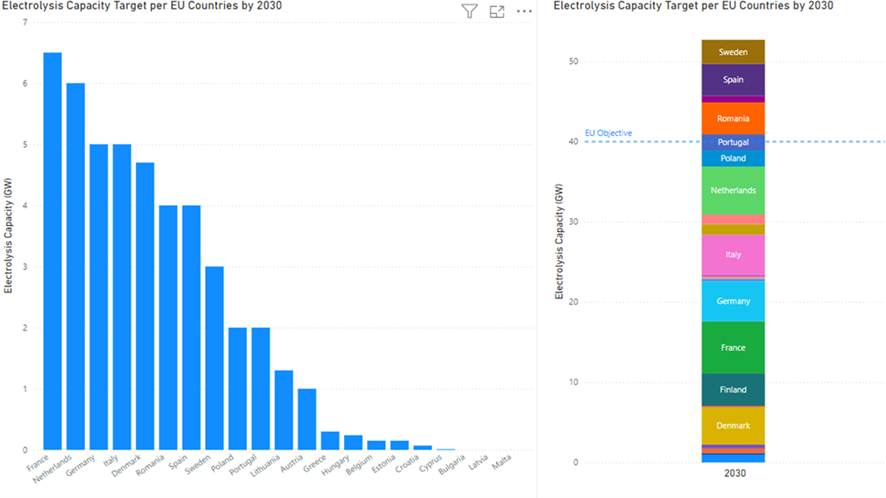
Figure 2 shows the installation objectives of the different EU countries, which together manage to exceed the overall target for the region. Countries such as France and the Netherlands plan to reach up to 6GW of national capacity, followed by Germany, Italy and Denmark with 5 GW, or Romania and Spain with 4 GW.
Fig.2. Targets for installed capacity of electrolysers in EU countries by 2030. Source: Own elaboration for HYDRA project
According to the 2024 Global Hydrogen Review published by the International Energy Agency, the current installed capacity in Europe is 2 GW, leaving the 40 GW target a long way off. The challenges of financing for large infrastructure, electrolyser manufacturing capacity and connecting hydrogen producers and consumers need to be overcome to boost this growth.
Hydrogen policies in the rest of the world
At a global level, goverments´ concern for the energy and environmental situation has drivenpolicies and strategies for decarbonisation using renewable hydrogen. Not only large hydrogen producing and consuming countries, but also countries that see hydrogen as a great opportunity for development and economic growth, thinking about the posibility of international trade.
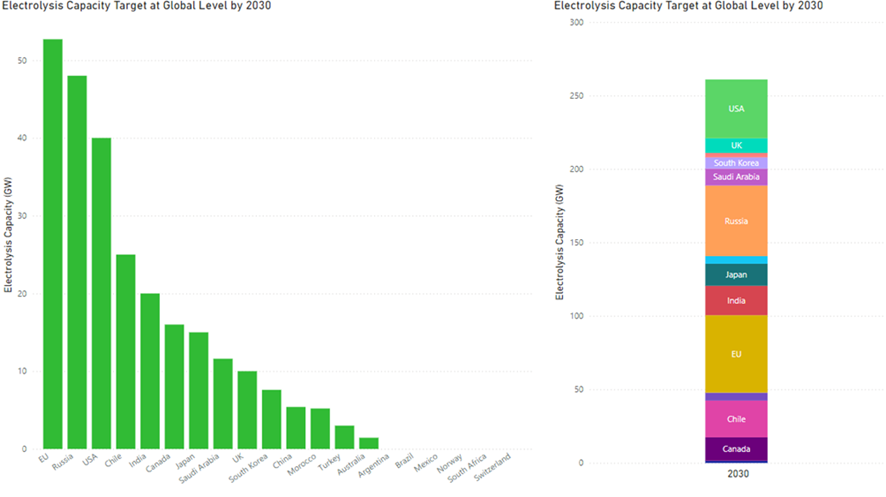
Figure 3 shows the electrolysers installation targets of other countries compared to the EU, together reaching more than 250 GW. Regions such as Europe, Russia and USA will try to reach more than 40 GW of generation, but also countries such as Chile, India or Canada are planning large investments, taking advantage of the opportunity to trade with hydrogen.
Fig.3. Global installed power targets for 2030. Source: own elaboration for HYDRA project.
Achieving the proposed targets, especially considering that we are halfway through many of them, is a considerable challenge. Of the 520 GW of projects announced for 2024, only 20 GW have reached the final financing decision, making this the biggest challenge to hydrogen penetration. As for electrolyser manufacturing capacity, it currently stands at 5 GW, although it has increased ninefold since 2021. The challenges are great, however, the global commitment and the desire to lead this energy revolution keep the commitment to hydrogen as a transformational solution alive.
The future of hydrogen in Spain
Spain updated the PNIEC in 2023, increasing the objective for electrolysers capacity to 12 GW by 2030, more than a quarter of the total European Union target. Spain currently has an installed electrolyser capacity of 35 MW, and has the largest industrial electrolyser in Europe: a 20 MW electrolyser located in Puertollano, Ciudad Real. However, for the time being it depends on external electrolyser manufacturers.
“Spain has the largest industrial electrolyser in Europe. 20 MW located in Puertollano, Ciudad Real”
This commitment reinforces the need to careful planning to maximise the economic, environmental and social benefits of this revolution. Despite progress in funding and project approval, further analysis of the impacts of hydrogen on the economy, land use and society is still needed.
Thanks to the use of Integrated Assesment Models, we can simulate complex scenarios and assess the effects of this transition, ensuring data-driven planning with a holistic sustainability perspective. At CARTIF, we work to understand and optimise the role of hydrogen in the energy transition. Through HYDRA project (no. GA 101137758), we have analysed hydrogen policies at European and global level, using Integrated Assesment Models (IAMs) to explore how this technology can be sustainably integrated into different sectors.
The implementation of policies such as RePowerEU and support for “hydrogen valleys” demonstrate a strong commitment to the development of this technology. However, international collaboration and strategic planning will remain essential to maximise its positive impact.
Renewable hydrogen represents a unique opportunity to transform our energy model and move towards a cleaner and more sustainable economy. At CARTIF, we continue to research and developsolutions that makes this vision a reality.
The future of hydrogen is now! Join the revolution and discover how this technology is changing the world.
In a geo-political and socio-economic environment such as ours, in which the industrial and business environment requires liquid managers with the ability to make decisions that adapt to the environment like water to the container that holds it, in which unlearning and relearning is worth more than the knowledge acquired so far, in which action plans must consider exploitation and exploration activities at the same level of importance. In this fast-paced world, the rest of agents in the innovation ecosystem -technology centres and research agents, public administrations, and society-, need to introduce routine actions that balance the objective risk-return ratio for each entity. Routine actions repeated by each one of them, reinforcing the role of each one of them. The role of each agent is a subject I dealt with in the post “Every stick hold its own”
We need routines that reduce the level of uncertainty in the environment in which we move, routines that allow us to make quick decisions with the addequate risk to the rentability we want to achieve, routines that respond to how, what, who, where and why of each value proposition.
These routines begin in the formation of universities, where the seed must be sown so that the routines begin to take root and the ecosystem allows it to grow in fertile soil and reproduce itself and leave a legacy.
These routines, although they may seem antonyms of innovation because of their repetitive and predictable nature, are in in fact the pillars that support the possibility of exploring the unknown. In a dynamic innovation ecosystem, routines are not simply inert habits; they are the scaffolding that allows us to experiment, learn and evolve with purpose. Like the musician who rehearses the same scales day after day to improvise masterfully in concert, routines in innovation are the disciplined rehearsal that precedes disruptive genius.
“Routines in innovation are the disciplined rehearsal that precedes disruptive genius”
In this context, routines should not be confused with rigidity. Rather, they are organisational patterns that provide stability without sacrificing the flexibility needed to adapt to change. For example, design thinking processes or agile methodologies, while structured, leave room for creativity and iteration. These practices demonstrate that innovation doesn´t emerge from absolute chaos, but from a balance between order and freedom.
In addition, routines play a crucial role in knowledge transfer. Universities and technology centres, especially, can structure training programmes for individuals and companies, as well as collaborative projects as the request of CIOS (Chief Innovation Officer) that turn exploration activity into practical and scalable aplications in a systematic way. In this sense, the routine becomes the mechanism that facilitates the cross-fertilisation of ideas and the market.
On the other hand, in a world that demands quick responses and effecetive solutions, routines help to reduce the friction between creativity and implementation. These routines not only clarify the steps needed to execute an idea by answering to how, what, who, where and why, but also align all actors involved, from companies and public administrations to researchers and technologists, in a common direction.
The key lies in designing routines that encourage continuous learning and systematic experimentation. This means unlearning what no longer works and developing new habits that incorporate diversity, technology and sustainability as core principles. In this way, the innovation ecosystem will be consistent with its purpose and will not only be able to adapt to the challenges of the present, but also to anticipate the opportunities of the future.
Ultimately, routines in innovation are not an end in themselves, but the means to generate sustainable impact. Routines reinforce the role of each agent, balance the risk-return trade-off and promote the establishment of a culture of collaboration and growth. These repetitive practices become the engine that drives transformational change. Because, paradoxically, true innovation is born of constancy: the constancy to do, to try, to fail and to try again.
Innovate for you, innovate for me, innovate for all of us.
The term eco-design is rather known nowadays, but you’ve probably heard little about eco-manufacturing, especially since it’s not a term widely recognized in technical or academic literature. However, it is a concept that has recently started to be used to describe manufacturing practices that centrally incorporate environmental aspects. Well, I’ll go even further, and try to explain what “metal-eco-additive manufacturing” is, a term I just invented to title this.
Forty years ago, Charles Hull’s invention of stereolithography (SLA) gave rise to what we now know as 3D printing – or additive manufacturing. Going one step further, the concept of metal 3D printing emerged after decades of development and experimentation, though its ideation can be attributed to Carl Deckard, a pioneer in Selective Laser Sintering (SLS) about 30 years ago at the University of Texas. Far from its industrial application at the time, its development went hand in hand with advances in new materials and high-power lasers in the 2000s. Although many have heard of processes for metal 3D printing, such as Selective Laser Melting (SLM) or Electron Beam Melting (EBM), it’s worth noting that the technology took 10 more years to reach large-scale industrial production – not just prototypes, as was done during the development phase for sectors like aerospace, automotive, or medical (which had the money for such “toys”).
Over the past 15 years, metal 3D printing processes have significantly improved (in precision, resolution, speed, physical properties, quality control, etc.), largely due to the emergence of new materials and their characteristics. On the other hand, methodologies have been created to analyze the efficiency of manufacturing processes themselves, parametric control, automation, and robotics, which directly impact costs, thus enabling the expansion of metal 3D printing applications to other sectors. Currently, these enhanced processes include, for example, Powder Bed Fusion (PBF), Direct Energy Deposition (DED), and metal Binder Jetting.
Well, the thing with additive manufacturing is like any technological process – progress is unstoppable: we don’t make airplanes the same way we did 120 years ago, right? 120 years ago, flying was already a reality (12 seconds and 36.5 meters), but I doubt we would agree to define “flying” the way the Wright brothers did in 1903. Their goal was “simply” to fly and survive. I don’t think they could have imagined that their scientific curiosity would become a key pillar of the global economy, nor did they think about 600-passenger airplanes, certifications governing the industry, or the pervasive existence of spaces for takeoff and landing.
In the same way, Carl Deckard, beyond his scientific interest in mechanical engineering, probably didn’t envision changing the world with his invention. However, just as air transport did, the additive manufacturing of metal parts has had, has, and will continue to have a massive impact globally. We now have new rules of the game and manufacturing possibilities for designs that were impossible until recently (generative designs), as their economic and environmental costs were prohibitive and bordering on madness. For example, if you don’t know how an airplane turbine is made (at least what it’s made from or how long it takes!!), you can’t appreciate the madness I’m referring to… and there are more and more airplanes every day!
Ecological awareness (so necessary today), the challenge ahead, and the transition to sustainability, will drive the circular economy in the use of metal additive manufacturing (or 3D printing). Or could it be additive manufacturing that will foster environmental sustainability? Or maybe a “virtuous loop” could be created where both fields will feed back into each other, by means of new concepts such as the one that I am coining here as metal-eco-additive manufacturing?
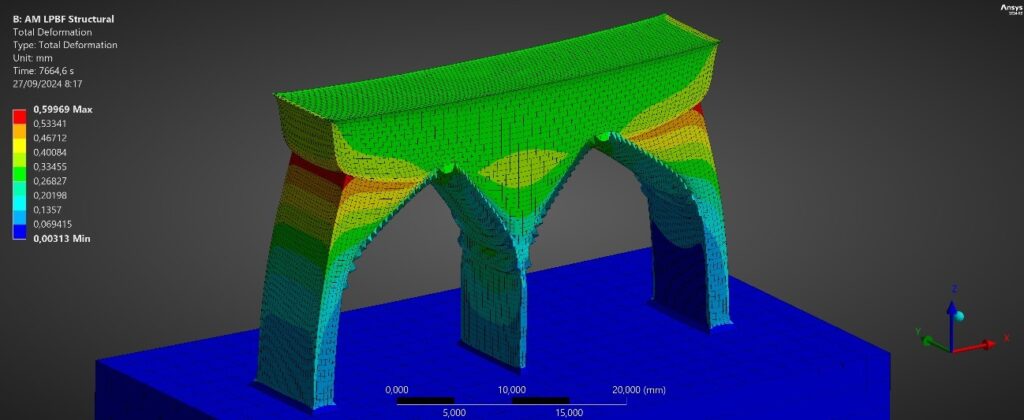
Simulation with lego of a metal-eco-additive-manufacturing laboratory. Author: Norberto Ibán Lorenzana
The thing is that everything evolves and new challenges arise; it won’t be enough just to design landing gears that fulfill their mission: apart from ensuring no one dies, they must be competitive. We must (and will be required to) know they were created in the most sustainable way possible and under circularity criteria. How? Well, looking towards the future, let’s imagine that the manufacturing conditions for a structurally responsible part could combine several manufacturing processes, not just one (machining) or the other (additive). Let’s also imagine that we could make parts that, although they could have inadequate finishes due to faster processes, these could be corrected in later treatments with techniques that require less effort. Or even, imagine that, if a part fails, we could refurbish it directly: that is, print what is missing on the same part so that the company using it can repair it in their own facilities. We wouldn’t have to throw away the part! Nor make a new one! We would avoid inventories of parts, storage, or transport of those spare parts, which is highly undesirable…
Well, the combination of additive manufacturing and circularity has a synergy point that will be researched and implemented over the next 4 years through a European project called DIAMETER, which involves more than 20 prestigious entities from 4 different continents.CARTIFis just one of these privileged entities that have already started working to build a bridge between metal additive manufacturing and the circular economy.
This bridge will be a framework where a series of metal parts used in critical cases across various production sectors will be analyzed, manufactured by different additive manufacturing processes. In DIAMETER, experimental physical results from the manufacturing processes will be compared with computational simulations of the parts in these processes to predict how the parts will respond to different process modifications. These responses (in terms of stress/deformation, among others) will provide mechanical knowledge about the parts and processes in terms of failures, waste, quality, or the need to integrate post-processing (hybrid manufacturing combining additive and subtractive). In short, a combination of possible scenarios and results that must be transformed into quantifiable outcomes under a sustainability approach to feed into an artificial intelligence system that will provide automated, optimal decisions on procedures and configurations in metal additive manufacturing of parts.
“Feed into an artificial intelligence system that will provide automated, optimal decisions”
“One moment, this is crazy!”
Well, yes, it’s as crazy as machining a 3m³ block of stainless steel on a 6-axis lathe for a week to get an airplane turbine or a hydraulic turbine. Or, seen another way, 500K€ for a week, with the possibility that, if there are errors, the turbine might need to be thrown away and start over from scratch.
But let’s take it step by step. The first thing will be to characterize these manufacturing processes, see how the parts are generated and whether they suffer deviations, inaccuracies, or analyze the quality of the surface itself. For this, artificial vision technology for geometric verification of parts during the manufacturing process will be used, which are technologies in which CARTIF has been working 30 years… and we have much ahead to go in the future!
Co-author
Iñaki Fernández Pérez. PhD in Artificial Intelligence. Researcher at the Health and Wellnes area at CARTIF. He is currently collaborating on several projects that seek to apply cutting-edge technologies (AI, IoT, Edge Computing…).
Artificial intelligence (AI) is no longer the stuff of futuristic fantasy; it has become a tangible part of our everyday lives. From personalised recommendations on streaming platforms to optimising logistics processes in a factory, AI is everywhere. What’s interesting is that it’s not just making our lives easier, it’s also transforming industry.
In the HUMAIN project, where we are working with companies such as BAMA and CENTUM, we are taking AI to the next level. Imagine a factory that can anticipate problems before they happen, thanks to data-driven predictive systems. Or robots working alongside humans to efficiently pack and palletise products, even if the boxes are of different sizes. It’s like switching from a manual to an automatic car!
But this is not science fiction. We are researching and developing artificial intelligence algorithms that turn vast amounts of data into intelligent decisions, computer vision systems that see beyond what the human eye can see, and machine learning-based predictive maintenance solutions that save time and money. AI acts as a strategic brain that optimises every aspect of the process, from production to logistics. The result? More sustainable operations, less waste and smarter factories.
These kinds of projects don’t just benefit large companies. They also have a direct impact on our lives. Think about it: every time you buy something online and it arrives on your doorstep in record time, there is probably an AI system behind it that has optimised every step of the process. From packaging to delivery.
In the HUMAIN project consortium, we are excited to be part of this revolution. It’s not just about making machines work faster, it’s about integrating disruptive technologies that put people at the centre of the process. After all, AI is a tool: it’s how we use it to improve our everyday lives that matters.
Are we ready to embrace this industrial revolution? The answer lies in every click, every purchase, and every robot working hand in hand with us.
The Statute of Autonomy of Castilla y León, in its preamble and several articles, emphasize the importance of Cultural Heritage as an essential part of the identity of this Community and as an asset to protect and promote, due to its unique richness and the recognition it brings beyond our borders. This Heritage includes not only movable and immovable goods but intangible assets. Understanding and managing these elements is crucial for their protection, conservation, and transmission to future generations, areas in whichCARTIF has been working for 25 years, making it an international benchmark.
The figures are overwhelming: Castilla y León has specifically protected more than 2,500 Assets of Cultural Interest (BIC), of which 11 are listed on the UNESCO World Heritage List, among which are three of the nine capitals of the region: Ávila, Salamanca and Segovia. Additionally, to date, it has cataloged more than 23,000 archaeological sites, over 500 castles, 12 cathedrals, one of the largest concentrations of Romanesque art in the world, and more than 200,000 movable assets of the Catholic Church have been inventoried.
Much of this immense Cultural Heritage of Castilla y León is located in the rural areas of the Community, as:
The 2,564 protected BICs are distributed among 878 municipalities, of which 94% are in populations of fewer than 5,000 inhabitants.
The 1% of municipalitieswith more than 10,000 inhabitants, which group almost half of the population of Castilla y León, only account for 18% of the goods.
2,564 protected BICs distributed among 878 municipalities
1% municipalities account for 18% of the goods
These numbers highlight that we are facing a resource as irreplaceable as it is essential for our future, with an unquestionable educational and social value, even more so in rural areas. It also has considerable economic potential, with the advantage of being endogenous and non-relocatable. Slowly, but inexorably, it is seen as an undeniable opportunity for development and not as an economic burden at all.
In the estimation carried out based on the study by the Association of Cultural Heritage Entities (AEPC -comprising 27 community companies employing 600 workers-), it was assessed that the heritage sector in Castilla y León generates 225 total jobs per million Euros of investment, which are distributed among 8% direct jobs (17), 8% indirect jobs (18), 50% induced in other industries (113), and 33% derived in tourism (77). To top it off, every euro invested quintuples the return on investment.
In a Europe that is becoming more of a large museum than a large factory, will we finally commit to the vein that Heritage represents for us?
Treatment and purification of wastewater from different industries by electrochemical methods
The modern world is inconceivable without the various industries that shape it: the creation of value-added products from raw materials, although a concept as old as civilisation itself, would not have developed so rapidly without the Industrial Revolution, which made it possible to obtain products with little difference between them in less time and at a lower price.
Like everything else, this growth of the industry has brought with it a number of problems. Many of these have been solved over time or have been properly minimised to the point where they are no longer a problem. At the end of the day, the aim is to produce as little waste as possible in the transformation of raw materials into products, as this generation involves the treatment of waste in order to dispose of it properly.
Even so, there are some industries that are known to leave an indelible mark on the area in which they are located, such as the paper industry. It should be added that in the last 20 years the regulations implemented, as well as the work carried out by the pulp treatment companies themselves, has helped to reduce the industry’s carbon footprint (an environmental indicator that aims to reflect the total greenhouse gases emitted as a direct or indirect effect of, in this case, an organisation).
But, even with the work done so far, a system in which the waste generated is zero is impossible. An industry such as the paper industry will always generate wastewater that must be treated differently from that generated in households. Therefore, many companies in the industry are looking for ways to inert their waste flows so that they do not pose a problem for the environment.
Another industry that suffers from the same problem as the paper industry is the mining industry, where the extracted heavy metals are part of the gangue of the ore, which is of no economic interest to the company. The problem is when the concentration of heavy metals is too low to be trapped by physical methods such as coagulation or flocculation. Although the amount of metals in the waste streams is reduced, there is a certain amount of compounds harmful to the environment and humans that give the waste streams a concentration above the recommended levels.
To solve these problems, different techniques have been proposed to control the amount of harmful components that industries can discharge, but, in this blog entry, I want to talk mainly about different electrochemical techniques that exist to carry out this task. To do so, I think it is appropriate to make a brief summary of the branch that uses these techniques, which is electrochemistry.
Electrochemistry overview
Electrochemical reactions can be divided according to the potential needed to carry them out. When chemical reactions are induced by an external potential difference, i.e. a voltage needs to be applied to carry it out, the process is called electrolysis. On the other hand, if the electrical potential difference arises as a result of a chemical reaction, i.e. a voltage is generated as a consequence of the reaction, we are dealing with an ‘electrical energy accumulator’, commonly known as a battery or galvanic cell.
“Electrolysis. When chemical reactions are induced by an external potential difference”
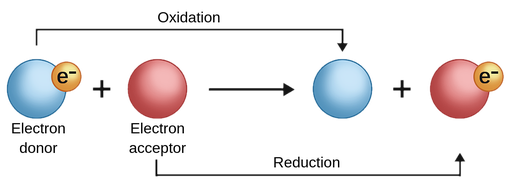
Chemical reactions in which electrons are transferred between molecules are called redox reactions, which comes from the fact that, for a complete electrochemical reaction to take place, there must be a half-reaction in which one compound is reduced and another half-reaction in which another compound is oxidised, thus giving rise to this type of reaction. These reactions are essential in electrochemistry, as they enable the processes that generate or are induced by electricity.
In general terms, electrochemistry is concerned with investigating cases where oxidation and reduction reactions occur separately, either physically or at different times, within a system connected to an electrical circuit. This aspect is studied in analytical chemistry, specifically in potentiometric analysis.
The use of electrochemistry in industrial wastewater is based on the fact that metal ions often have different oxidation states (the theoretical electrical charge that an atom would have if all its bonds with other elements were completely ionic). By playing with these oxidation states and the presence of counterions that are capable of forming a low-solubility salt, a large part of the heavy metals can be removed, as well as other ions that are likely to be harmful.
Paper industry: capacitive deionisation
In the case of CARTIF, one of the electrochemical techniques used to treat effluent water from the paper industry is capacitive deionisation.
Capacitive deionisation (CDI) technology is based on the removal of anions and cations using an electric field and electrodes composed of carbon-derived materials with high porosity and good electrical conductivity. This method allows the localised accumulation of positive and negative charges around the electrodes in an alternating cell process, in which each cell functions as a supercapacitor that stores electrical energy while reducing the conductivity of the solution due to the removal of charges from the medium.
The inversion of polarity makes it possible to recover the accumulated energy at the same time as cleaning the electrodes on the surface of which the ions of opposite charge have been deposited. Thus, by circulating water against the current, a large part of the energy previously used in the desalination process is recovered, which can be reused to continue reducing the amount of dissolved salts. This process is repeated in cycles through several cells connected in parallel, alternating cells in operation and cells in cleaning. This makes it possible to obtain a continuous flow of desalinated water, a rejection flow (current with a high concentration of salts, which, as its concentration increases, is easier to dry and store in the future) and an energy recovery that is used in the active cells.
“Inversion of polarity. Recover the accumulated energy at the same time as cleaning the electrodes on the surface of which the ions of opposite charge have been deposited.”
The main advantages of the CDI are:
Lower energy consumption compared to reverse osmosis (RO, which is based on applying pressure to the solution to push it through a semi-permeable osmosis membrane to filter it and remove the ions present) as it does not require high pressures to operate and allows recovery of much of the energy used in desalination, stored in the cells as in a capacitor.
Reduction in the use of chemicals, as no chelating agents are required to prevent clogging as in membrane-based technologies, as well as no need for acids and bases for resin regeneration in ion exchange systems.
Modularity and compactness. The possibility of using multiple cells in parallel facilitates compact assembly and progressive expansion of the treatment flow by adding modules, offering scalable growth and greater versatility, which is of great interest in the industry.
Mining industry: electrocoagulation
In the case of the mining industry, one technique that CARTIF has been considering is electrocoagulation (EC), which has a range of application that also covers suspended solids, emulsified oil, hydrocarbons and the like.
In its simplest form, an electrocoagulation reactor consists of an electrolytic cell with an anode and a cathode. When connected to an external power source, the anode material corrodes electrochemically due to oxidation, while the cathode undergoes passivation.
An electrocoagulation (EC) system essentially consists of pairs of conductive metal plates in parallel, which act as monopolar electrodes. In addition, it requires a DC current source, a resistance box to regulate the current density and a multimeter to read the current values. The conductive metal plates are commonly known as ‘sacrificial electrodes’. The sacrificial anode reduces the dissolution potential of the anode and minimises the passivation of the cathode. Sacrificial anodes and cathodes can be made of the same material or of different materials, depending on the composition of the solution to be treated.
The monopolar electrode arrangement with cells in series is electrically similar to a single cell with many electrodes and interconnections. In a series cell arrangement, a higher potential difference is required for a given current to flow, as cells connected in series have higher resistance. However, the same current will flow through all electrodes. In contrast, in a parallel or bipolar arrangement, the electric current is divided between all electrodes relative to the resistance of the individual cells, and each electrode face has a different polarity.
During electrolysis, the positive side undergoes anodic oxidation reactions, while the negative side undergoes cathodic reduction reactions. Consumable metal plates, such as iron or aluminium, are generally used as sacrificial electrodes to continuously produce ions in the water. The released ions neutralise the charges of the particles present in the solution and initiate coagulation. These ions remove undesirable contaminants, either by chemical reaction and precipitation, or by causing coalescence of colloidal materials, which can then be removed by removal of the organic layer that forms on the surface of the solution. In addition, as water containing colloidal particles, oils or other contaminants moves through the applied electric field, ionisation, electrolysis, hydrolysis and free radical formation can occur, which can alter the physical and chemical properties of the water and contaminants. As a result, the reactive and excited state causes the contaminants to be released from the water and destroyed or made less soluble.
Some of the advantages of this system, in comparison with the chemistry coagulation, are:
The flocs formed by EC are similar to flocs generated by chemical flocculation, except that EC flocs tend to be much larger, contain less bound water, are acid resistant and more stable, and can therefore be separated more quickly by filtration.
EC can produce an effluent with lower total dissolved solids (TDS) content compared to chemical treatments, particularly if metal ions can precipitate as insoluble hydroxides or carbonates.
The EC process has the advantage of removing smaller colloidal particles, as the applied electric field neutralises any residual charge, thus facilitating coagulation through the formation of larger micelles.
The CE process generally avoids the excessive use of chemicals, which reduces the need to neutralise excess products and reduces the possibility of secondary contamination caused by chemicals added in high concentration, as is the case when chemical coagulation is used in wastewater treatment.
The gas bubbles produced during the electrolysis of both the water in the solution and the components in the solution can conveniently transport the contaminating components to the surface of the solution, where they can be more easily concentrated, collected and removed.
In conclusion, we can state that industrial evolution has brought with it significant environmental challenges, especially in the management of waste and toxic pollutants. To mitigate these effects, electrochemistry has emerged as a key tool in wastewater purification, highlighting techniques such as capacitive deionisation (CDI) and electrocoagulation (EC). These technologies make it possible to reduce the concentration of heavy metals and other pollutants with less use of chemicals and lower energy consumption. Thus, electrochemistry offers sustainable solutions to minimise the ecological impact of industries by optimising the treatment of their waste and contributing to environmental protection.