Es difícil encontrar una definición de Smart Grid que incluya todos los objetivos, posibilidades y tecnologías que se engloban dentro de este concepto. Cuando uno navega en la red buscando la definición de este término puede encontrase con largas descripciones que intentan incluir todos los aspectos que abarca, o con otrasdemasiado breves que se enfocan únicamente en aquello que el autor quiere resaltar. Dejando al lector la posibilidad de profundizar en dichas definiciones, y a riesgo de simplificar demasiado, podríamos decir que las Smart Grid incluyen al menos (entre otras muchas) estas características:
– Generación distribuida: permiten mejorar la gestión de una red con múltiples fuentes de generación donde las renovables tendrán cada vez un mayor peso relativo. – Respuesta a la demanda: facilitan la intervención de los usuarios domésticos en la toma de decisiones sobre sus patrones de consumo gracias a la información que estos disponen sobre el precio de la energía, o por introducir en sus viviendas sistemas de generación o almacenamiento que apoyen el consumo que hacen de la red. – Sistemas TICS: se introducen sistemas de gestión de la información en todos los niveles de la red, desde los usuarios a los sistemas de generación, pasando por los centros de transformación. – Mejoran la fiabilidad y eficiencia de la red, ya que el uso de la información disponible permite definir mejores estrategias de gestión y también un mejor mantenimiento de todos los elementos y dispositivos, gracias entre otros al mantenimiento predictivo.
La implantación de las Smart Grid en todos los niveles del sistema eléctrico supondrá a primera vista innumerables ventajas para los diferentes actores del sector eléctrico, como por ejemplo:
– Disponer de mayor capacidad de generación de renovables con las que los usuarios complementen su consumo de la red. – Abaratamiento de la factura de la luz para los usuarios, pudiendo desplazar su consumo a las horas de precio más barato de la electricidad. – Aplanamiento de la curva de la demanda y por tanto una mayor facilidad para equilibrar oferta y demanda por parte del gestor de la red. – Facilitar el mantenimiento de los activos a los gestores de la red alargando su vida útil y evitando fallos inesperados.
Para alcanzar todos estos objetivos es necesario disponer de tecnologías adecuadas, unas ya existentes y otras todavía por desarrollar. Estas tecnologías deben enfocarse principalmente en tres ámbitos:
– Fuentes de energía: como equipos de generación de renovables o baterías a diferentes escalas de potencia. Estos permitirán un mejor aprovechamiento de la energía disponible en cada localización y para cada usuario. – Equipamiento y dispositivos para la operación de la red: entre los que estarían los smart meters, accionamientos teleoperados, electrodomésticos inteligentes,… Estos facilitarán el acceso a la información del estado de la red y la operación ágil y remota que requieran las decisiones de gestión adoptadas de forma automática. – Sistemas de ayuda a la toma de decisiones, que teniendo en cuenta la multitud de intereses que pueden confluir en esta red eléctrica inteligente, definirán en cada instante qué acciones serían necesarias para ajustar oferta y demanda.
Pero sin duda lo que sería un error es pensar que la red será inteligente cuando se consiga disponer de esas tecnologías, o pensar que serán esas tecnologías las que introduzcan la inteligencia en la red. Que una vez desplegados todos estos equipamientos y servicios la red se volverá automáticamente inteligente. Sirva como ejemplo de esto el dato de que actualmente Iberdrola ha alcanzado la sustitución del 76% de contadores por el denominado contador inteligente (smart meter), y sin embargo podríamos preguntarnos cuántos de nosotros que ya lo tenemos instalado hemos cambiado nuestros hábitos de consumo gracias a la información que nos proporciona, bien sea para reducir nuestro gasto o para favorecer una mejor gestión de la red y ayudar a reducir los picos de consumo.
Sin duda sólo dispondremos de verdaderas redes inteligentes cuando todas las personas implicadas en la generación, consumo, diseño, generación de herramientas o gestión de la red eléctrica pongamos nuestra inteligencia a trabajar en red.
Esto a mi modo de ver implica no poner la inteligencia sólo en el desarrollo de las herramientas y la tecnología, sino también en la adecuada selección de los objetivos que se persiguen con ella. Será inteligente aquella red en la que todos compartan unos mismos objetivos de sostenibilidad, cuidado del medio ambientey aprovechamiento de los recursos disponibles. Por supuesto que el beneficio económico será necesario para poder involucrar a muchos de los actores y para movilizar las inversiones requeridas, pero no parecerá inteligente una red donde éste sea el único objetivo a corto plazo. Más bien, podremos considerar una Smart Grid realmente inteligente aquellaen la que por ejemplo:
– los usuarios entiendan que participar en estrategias de respuesta a la demanda no sólo les traerá rebajas en la factura de la luz, sino que contribuirá a un sistema que aprovecha mejor los recursos renovables. Por tanto no sólo ofrecerán su flexibilidad a cambio de incentivos económicos sino que lo harán también cuando facilite un mayor aprovechamiento de las fuentes renovables contribuyendo así al interés general y al medioambiente. – las operadoras asuman que sus inversiones además de un beneficio económico, deberían buscar un beneficio social y medioambiental aún cuando aquel quizá se vea limitado. – el gobierno no ponga trabas a las medidas que aumenten la independencia energética de los usuarios particulares, que permitan aprovechar todos los recursos renovables disponibles y que faciliten el acceso a las tecnologías que ayuden a todo ello.
En definitiva, será una red inteligente aquella en la que todos los implicados tengan entre sus objetivos el bien común a medio y largo plazo en cada una de las decisiones que tomen, ya sea en las decisiones estratégicas hechas por humanos, como en las decisiones de gestión automáticas hechas por los dispositivos inteligentes. Y es que la verdadera inteligencia no está tanto en el conocimiento que se desarrolla como en el uso que se hace de él.
En los últimos tiempos el uso de la Realidad Aumentada (AR, Augmented Reality) se está haciendo cada vez más habitual aprovechando la utilización masiva de dispositivos móviles en la vida cotidiana como smartphones o tablets, y la aparición de otros nuevos como las smart glasses. De este modo, diferentes aplicaciones generalmente de ocio como “Pokémon GO”, o los filtros de edición de imagen de “Snapchat” han terminado de popularizar esta tecnología, aunque sus aplicaciones también se extienden al mundo profesional.
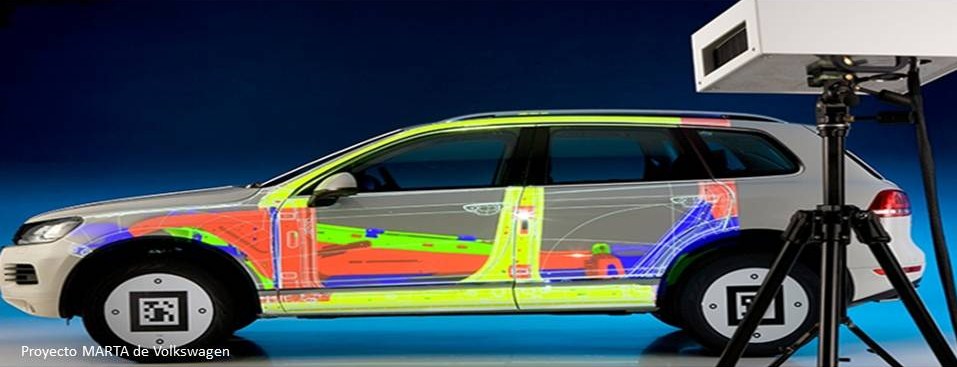
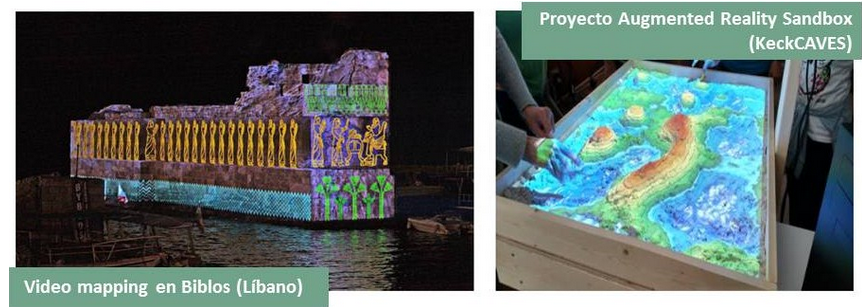
Sin embargo, la tecnología AR ni es nueva, ni está supeditada al uso de móviles o gafas inteligentes. Existe una técnica denominada Realidad Aumentada Espacial (SAR, Spatial Augmented Reality), que se distingue por la no utilización de dispositivos como interfaz de usuario. Como tecnología de AR, su principal función es añadir información digital a la realidad, pero en este caso la información se muestra directamente sobre el objeto físico, normalmente mediante proyectores digitales.
Debido a que la superficie de proyección no está asociada al usuario, la SAR es una buena herramienta para el trabajo colaborativo porque puede ser utilizado por varias personas a la vez. Del mismo modo, el usuario no debe someterse al desgaste visual que puede producir el uso de pantallas o gafas especiales o cargar con dispositivos móviles. Estos aspectos hacen que la SAR, además de otras aplicaciones como juegos, tenga buena aplicación en la industria.
En la industria del automóvil es frecuente su uso en fases de diseño, proyectando sobre el propio coche diferentes opciones de acabado, o de mantenimiento, ofreciendo información al mecánico de la mejor forma de acometer una reparación.
SAR en puestos de ensamblaje
Dentro de la industria, una de las mayores aplicaciones que tiene la SAR, es la de asistencia en los puestos de montaje manual. Por medio de uno o varios proyectores situados en el puesto de montaje, se puede guiar al trabajador en la secuencia de tareas a realizar, mostrando la información sobre la propia mesa de trabajo o sobre la misma pieza. Las ventajas que ofrece esta tecnología son principalmente:
• Reduce o elimina la necesidad de monitores y pantallas, al mostrar las instrucciones directamente en el espacio de trabajo. • Disminuye la carga cognitiva de los usuarios cuando se siguen las instrucciones de trabajo, siendo especialmente adecuada para entrenamiento y formación de nuevos trabajadores. • Reduce descuidos al no haber necesidad de «cambiar la atención» entre instrucciones de trabajo y la tarea a realizar. • El trabajador no debe cargar con ningún tipo de dispositivo o someterse al desgaste visual que puede producir el uso de gafas especiales. • Varios trabajadores pueden trabajar a la vez con un único sistema de SAR instalado.
Este tipo de aplicación combinada con algún sistema que permita la validación de la ejecución de la tarea (como puede ser la localización de herramienta o el seguimiento de las manos del trabajador mediante técnicas de visión artificial) permite confirmar la correcta ejecución de las operaciones mejorando la trazabilidad de las operaciones y la reducción de errores.
En CARTIF estamos trabajando en varios proyectos con estas técnicas de SAR, desarrollando e integrando sistemas asistivos en operaciones de ensamblaje, aprovechando las ventajas que ofrece esta tecnología y reduciendo lo máximo posible los puntos más delicados que tiene, como la luminosidad del entorno, la adaptación de la proyección al color y forma de las piezas, o posibles oclusiones que puede producir el propio trabajador al realizar las tareas.
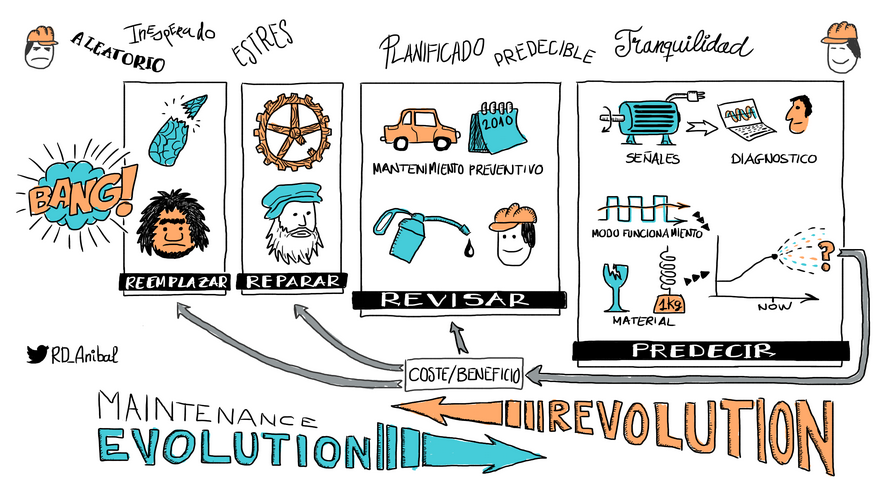
En anteriores posts, el mantenimiento predictivo fue mencionado como uno de los principales habilitadores digitales de la Industria 4.0. El mantenimiento, ligado a la revolución industrial, sin embargo, nos ha acompañado en nuestra evolución como seres humanos.
Desde la prehistoria, nuestros antepasados han construido herramientas que sufrían desgaste y que, a veces, se rompían sin previo aviso. La solución era simple: tallar una nueva herramienta. Al crear mecanismos más elaborados (e.g. rueda de madera), la alternativa natural al desecho se convirtió en la reparación a cargo del artesano. Los telares mecánicos de la Primera Revolución Industrial eran aún más complicados de reparar por lo que surgieron oficios específicos que evolucionaron hacia los operarios de mantenimiento actuales. Durante esta evolución, el desgaste y las roturas de piezas sin previo aviso continuaba siendo parte del día a día de las fábricas.
¿Por qué se ha roto de repente este engranaje que ayer funcionaba perfectamente? El cerebro humano puede asimilar conceptos como la linealidad de acontecimientos (estaciones, noche y día, …) o incluso eventos que suceden a intervalos más o menos regulares. Sin embargo, estos imprevistos desquiciaban a los operarios. ¿Cómo podemos asegurarnos de que ese engranaje no vuelva a romperse? La respuesta era biológicamente predecible: “… pararemos la máquina cada 2 días (por ejemplo) y revisaremos el desgaste del engranaje…”
Esta tradición ha derivado en la práctica habitual del mantenimiento que se aplica en la industria y en productos de consumo como, por ejemplo, nuestros automóviles. Nuestro concesionario nos obliga a realizar revisiones periódicas (e.g. cada 10.000 km) para comprobar elementos críticos (frenos, correa de distribución, …) y cambiar piezas con un mayor desgaste (ruedas, filtros …). Esto se denomina mantenimiento preventivo, y se aplica en fábricas u otro tipo de instalaciones (e.g. aerogeneradores) para evitar averías imprevistas. Sin embargo, estas averías no se pueden eliminar (son eso, imprevistas) y es necesaria su reparación. Hablamos de mantenimiento correctivo. El que nadie quiere hacer.
¿Cómo ponerle freno a toda esta catarata de averías inesperadas, gastos de reparación y revisiones innecesarias? Una de las disciplinas en las que más ha trabajado CARTIF desde sus inicios es el mantenimiento predictivo que persigue mitigar (no sería realista asumir que vamos a eliminar lo imprevisto) las averías inesperadas y reducir las revisiones periódicas de las máquinas. De nuevo el mantenimiento predictivo puede explicarse como una respuesta biológica previsible al problema de averías inesperadas. Se basa en la revisión periódica usando señales características del entorno o de la propia máquina que nos puedan indicar de forma anticipada un funcionamiento anómalo. La ventaja de este mantenimiento es que no requiere parar la máquina como en el preventivo. Por ejemplo, un motor eléctrico puede tener un consumo normal cuando funciona correctamente, pero este consumo aumentará si algún elemento del motor sufre algún desgaste excesivo. Vigilando el consumo de forma adecuada podemos entonces detectar averías incipientes.
Siguiendo con el ejemplo del motor eléctrico, ¿cuál debe ser la variación mínima de consumo a tener en cuenta para decidir que debemos parar el motor eléctrico y efectuar una reparación? Como en muchas decisiones de la vida, es necesario aplicar un criterio de coste/beneficio, valorando cuánto podemos perder si no reparamos dicho motor frente a cuánto va a costar la reparación. ¿Cómo reducir la incertidumbre en esta decisión? La respuesta es una predicción fiable de la evolución de la avería. Esta predicción estará influenciada por muchísimos factores, algunos de ellos desconocidos (es algo aleatorio como hemos dicho). Sin embargo, los dos principales a tener en cuenta en la predicción son el tipo de evolución de la avería (e.g. la evolución de la avería en una pieza frágil será muy diferente a una pieza más o menos elástica) y el régimen de trabajo al que se verá sometida la máquina (un ventilador encendido las 24 horas del día, frente al motor de un ascensor que arranca y para cada vez que alguien pulsa el botón en un piso). Una predicción fiable permitirá al responsable de mantenimiento elegir, junto con la previsión de carga productiva de la instalación, la opción más beneficiosa, que en muchos casos suele ser la planificación de la intervención de mantenimiento sin que afecte a la producción.
Otro efecto beneficioso del mantenimiento predictivo es que un tratamiento adecuado de las señales medidas ofrece indicios de qué elemento está fallando. Esto se denomina el diagnóstico de la avería y contribuye a reducir la incertidumbre en la acción de mantenimiento más adecuada. Un ejemplo es la medición de vibraciones que permiten diferenciar una avería de un motor eléctrico que tiene un exceso de vibración por un cortocircuito incipiente o debido a un rodamiento dañado. Pero eso es materia de otro post.
La agricultura y la ganadería son actividades económicas que en algunos lugares de Europa tienen un alto valor social. Además, hay que sumar el peso que tienen en la economía de muchas regiones y la importancia que se les da en las políticas de la Unión Europea. A pesar de esto, los agricultores y ganaderos no tienen fácil conseguir un rendimiento económico similar al que en su entorno social obtienen otras profesiones.
Desde la Ilustración, se han venido produciendo descubrimientos e invenciones que han permitido a la agricultura y a la ganadería mejorar las cosechas, las razas y, en general, el rendimiento de las explotaciones. El siglo XXI ha traído Internet y el Internet de las Cosas. Ni la agricultura ni la ganadería van a dejar de aprovecharse de las tecnologías de El Internet de las Cosas. Trata sobre la comunicación entre las máquinas y se apoya en la computación en la nube y en redes de sensores. Es móvil, virtual y necesita de conexiones a Internet fiables. Permite dotar a las máquinas y a los procesos de percepción del entorno y de la inteligencia necesaria para optimizar su funcionamiento por sí mismos.
La agricultura y ganadería de precisión pueden ser la puerta de entrada del Internet de las Cosas en esta actividad milenaria. Se trata de dotar de sensores a todos los elementos que participan en el proceso, desde el suelo de las parcelas hasta la maquinaria, pasando por las plantas o los animales, para tomar decisiones a partir de los datos que generan, como ya contamos aquí.
Pero, aunque el Internet de las Cosas puede mejorar el rendimiento de las explotaciones, no podemos olvidar que los precios que reciben los agricultores y ganaderos por sus productos los fija el mercado. La Política Agraria Común (PAC) ha ido evolucionando a lo largo de las décadas desde una posición proteccionista (anterior a la entrada de España en la UE), hasta la situación actual, en la que el mercado está prácticamente desregulado y, por lo tanto, las rentas de los agricultores y ganaderos están sujetas a los vaivenes del mercado. Estando así las cosas, una organización de la oferta podría ayudar al sector agropecuario a defender sus intereses. ¿Podría el Internet de las Cosas contribuir a la organización de la oferta de la agricultura?
Imaginemos una región en la que todas las explotaciones tuvieran implantado el Internet de las Cosas para desarrollar sus tareas de manera eficiente. En principio sólo sería un paso más en la tecnificación agropecuaria, y supondría el registro de todos los parámetros que determinan el rendimiento de una explotación y que describen su estado. Imaginemos ahora que todas las explotaciones se comunican entre sí de manera autónoma y comparten toda la información que registran los sensores. Imaginemos, por fin, que esa red de explotaciones por la que fluye toda la información tuviera inteligencia.
Esta inteligencia artificial recibiría, además, información sobre quiénes son y dónde están los posibles compradores, los precios que pagan, el estado de las cosechasen regiones competidoras, las predicciones de mercado y climáticas. Con toda esta información sobre el estado de las explotaciones y del mercado, esta inteligencia artificial gestionaría las explotaciones a las que está conectada, sugiriendo a los agricultores y ganaderos diferentes acciones con el objetivo de maximizar los precios de venta. Por ejemplo, podría llegar a la conclusión de que el precio máximo de cierto producto se obtendrá si se oferta cierto número de toneladas a determinado comprador en determinado día. De entre todas las explotaciones elegiría a aquéllas en las que el producto haya alcanzado el mejor grado de madurez e indicaría a los agricultores el día en el que todos ellos deberían recoger el producto para ofrecérselo conjuntamente al comprador seleccionado.
Un esquema como el propuesto convertiría a las explotaciones en cosas conectadas a Internet con la inteligencia necesaria para optimizar por sí mismas su funcionamiento. Además, facilitaría la mejora de las condiciones de trabajo y de vida en el medio rural por su posible impacto en la renta del sector agropecuario.
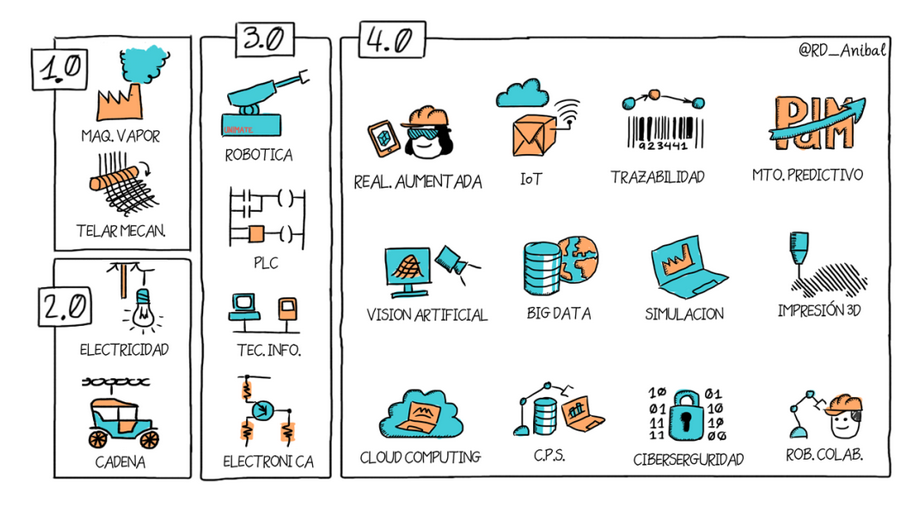
Mi primer post sobre Industria 4.0 señalaba la necesidad de disponer de tecnologías claveque posibilitasen la 4ª revolución industrial y que se han dado en llamar “habilitadores digitales”. Cada revolución industrial ha tenido sus habilitadores. La primera fue posible gracias a invenciones como la máquina de vapor o el telar mecánico. La segunda, vino de la mano de avances como la luz eléctrica o las cadenas de montaje de coches. En la tercera, hicieron su aparición tecnologías disruptivas como la robótica, la microelectrónica o las redes de ordenadores.
Y llegamos a la cuarta. Diferentes estrategias de fabricación avanzada como la Industrie 4.0 de Alemania o el Advanced Manufacturing Partnership de EEUU han señalado diferentes habilitadores clave. En España tampoco nos hemos quedado atrás con la iniciativa “Industria Conectada”.
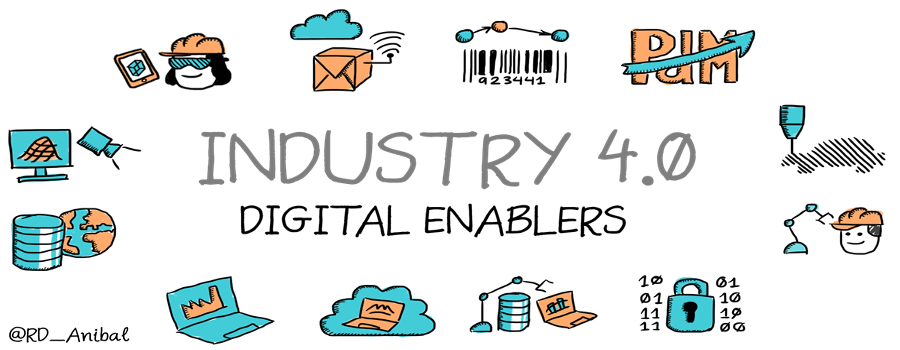
Este post pretende ser una “lista de la compra” con aquellas tecnologías consideradas como más relevantes en esta cuarta revolución. Cada breve descripción está enlazada con información ampliada dentro de nuestro Blog. En próximas entregas, completaremos esta información para tener el abanico completo de tecnologías:
Realidad Virtual Aumentada: se usa para proporcionar información adaptada al contexto al operario (e.g. durante una operación de mantenimiento) y mezclada con su campo de visión.
IoT: conexión a internet de casi cualquier objeto, en este caso, que nos podamos encontrar en una fábrica: una pieza, un motor, una herramienta…
Trazabilidad: busca el seguimiento y registro exhaustivo de operaciones de fabricación (automáticas y manuales) así como de las condiciones en las que se han efectuado (temperatura, velocidad de producción…)
Mantenimiento predictivo: permite realizar mantenimiento de forma optimizada con el fin de evitar paradas inesperadas y costes excesivos por mantenimientos periódicos innecesarios.
Visión artificial: dotar al proceso productivo de información visual de contexto para realizar controles de calidad o servir de ayuda en la propia fabricación (e.g. posicionamiento automático de un robot para tomar una pieza).
Big Data: Generación de conocimiento y valor a partir de datos de la fabricación y otros datos de contexto (e.g. demanda de productos similares o relacionados).
Simulación de procesos productivos: permite contar con un “gemelo digital” del proceso productivo que puede optimizar la producción y ayudar en la toma de decisiones (e.g. cambiar el flujo de trabajo de una línea).
Impresión 3D: se usa para recreación de réplicas tridimensionales de: piezas existentes, repuestos, o prototipos a escala o de tamaño real para su revisión o ensayo.
Cloud Computing: aprovecha los recursos de computación en internet para acometer procesos de almacenamiento y tratamiento de datos de gran volumen (e.g. Big Data) sin necesidad de realizar inversión en infraestructura IT propia.
Ciberseguridad: como conjunto de medidas de seguridad físicas y lógicas que protejan las infraestructuras de distintas amenazas, tanto informáticas como físicas (e.g. sabotaje).
Sistemas Ciber-físicos: cualquier sistema complejo formado por alguna de las tecnologías anteriores que buscan un funcionamiento mejorado, en este caso de la fabricación.
La fortaleza de estos habilitadores digitales no reside en sus características individuales, sino en su capacidad para combinarse. Los ingenieros somos demasiado aficionados al último grito en tecnología y luego encontrar un problema o ámbito para su aplicación. Pero para tener éxito en esta revolución, es necesario dar respuesta a retos concretos dentro de las fábricas, con soluciones innovadoras, y por qué no, combinando varios habilitadores digitales. Por otra parte, esta terminología crea un marco común que facilita el diálogo entre tecnólogos y responsables de fabricación para acometer con éxito proyectos que busquen optmizar la fábrica.
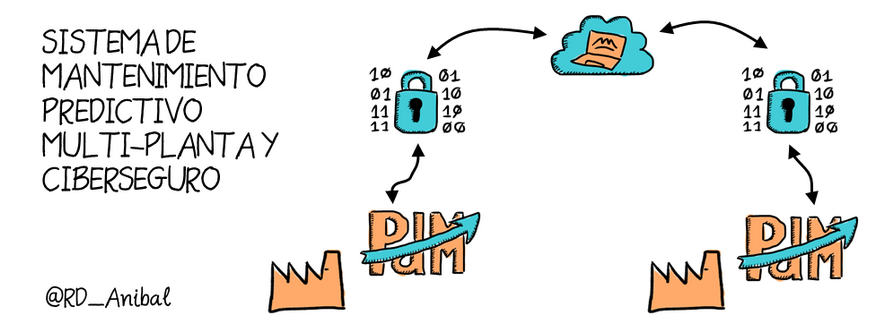
Si pensamos, por ejemplo, en optimizar las operaciones de mantenimiento en una fábrica, el mantenimiento predictivo será una de los primeros habilitadores que nos vendrá a la cabeza. Asimismo, esta solución tecnológica se beneficiará de una conexión a un sistema de Cloud computing donde se analicen los datos provenientes de sensores instalados en diferentes fábricas y que aprovechen la información realizando unos mejores diagnósticos o predicciones del elemento a mantener en cada caso. En este tipo de soluciones cloud, sin embargo, debe garantizarse la seguridad de la información transmitida mediante mecanismos adecuados de ciberseguridad. Estaríamos, por lo tanto, ante una solución tipo Industria 4.0 de Mantenimiento predictivo multi-planta y ciber-seguro.
Este listado, no obstante, no pretende ser cerrado ya que, como hemos comentado, la combinación de diferentes habilitadores da lugar a un amplio abanico de solucionesIndustria 4.0. Además, la evolución tecnológica es continua y cada vez más rápida. En próximos post analizaremos más escenarios donde los habilitadores digitales pueden dar respuesta a retos planteados en la fabricación.
Una red neuronal es un algoritmo que imita el funcionamiento de las neuronas y de las conexiones que hay entre ellas y son entrenadas para que tengan la capacidad de desempeñar una tarea. Se dice que una red neuronal aprende mediante el entrenamiento porque no hay una programación explícita para realizar una tarea, sino que la red se programa sola a partir de ejemplos. Las redes neuronales son el mayor exponente del llamado machine learning o aprendizaje automático.
Las redes neuronales pueden aprender a clasificar y a imitar el comportamiento de sistemas complejos. Si queremos que aprenda a diferenciar entre manzanas y naranjas sólo tenemos que mostrarle unos cuantos ejemplares de ambas frutas y decirle, a la vez, si se trata de una manzana o de una naranja. Una vez entrenada la red neuronal sabrá si está ante una manzana o una naranja. Lo interesante es que lo sabrá aunque las manzanas y naranjas no sean las que se le enseñaron durante el entrenamiento ya que las redes neuronales no memorizan, sino que generalizan. Esa es la clave del aprendizaje de las máquinas.
El interés en las redes neuronales decayó en el cambio de siglo. Por un lado, el mundo empresarial no había visto satisfechas todas sus expectativas y, por otro lado, el mundo académico se centró en algoritmos más prometedores. Sin embargo, algunos investigadores, sobre todo en torno a la Universidad de Montreal, perseveraron en el estudio de las redes neuronales y las hicieron evolucionar hasta lo que llamaron Deep Learning.
El Deep Learning es una serie de algoritmos emparentados con las redes neuronales que tienen la misma finalidad y un rendimiento mayor que otras formas de Machine Learning. La mayor diferencia es la capacidad de abstracción. Volviendo al ejemplo anterior, para clasificar naranjas y manzanas con una red neuronal es necesario extraer características que definan las frutas. Estas características pueden ser el color, la forma, el tamaño, etc. Representar las frutas mediante estas características es una forma de abstracción que debe ser diseñada por la persona que entrene la red neuronal. Pues bien, los algoritmos Deep learning son capaces de realizar una abstracción semejante por sí mismos, sin necesidad de que alguien la diseñe previamente. Por esta razón se dice que el Deep Learningno sólo es capaz de aprender, sino que, además, puede encontrar significado.
El Deep Learning ha aparecido en los medios de comunicación por el interés que han puesto en él grandes empresas y también por la espectacularidad de sus logros tecnológicos. A principios de 2016, los medios dieron noticia de cómo el programa AlphaGo de la empresa Google DeepMind ganó al campeón de goLee Sedol. Esto ha sido un logro técnico sin precedentes, puesto que la estrategia seguida con el ajedrez no puede usarse con el go. Cuando Garry Kasparov perdió al ajedrez en 1996 lo hizo frente a una máquina, la Deep Blue de IBM, programada para calcular todos los posibles movimientos futuros del contrincante. Por el contrario, la máquina de Google DeepMind no está programada para jugar al go, sino que fue enseñada a jugar al go antes de enfrentarse a Lee Sedol. Primero aprendió jugando con el campeón europeo de go y después contra otra versión de sí misma. Partida a partida, la máquina fue mejorando su juego hasta hacerse imbatible.
Grandes empresas como Google o Facebookusan Deep Learning de manera rutinaria en sus productos para reconocer caras y para interpretar el lenguaje natural. También hay empresas pequeñas que ofrecen productos basados en esta tecnología, como Artelnics o Numenta, que pueden aplicarse en muchos procesos industriales. Es de esperar un gran desarrollo de aplicaciones basadas en Deep Learning debido a la necesidad de automatizar el tratamiento inteligente de las enormes cantidades de datos que se generan a diario y, además, porque hay una serie de herramientas open source que ponen estos algoritmos al alcance de todos, como Theano, TensorFlow, H2O u OpenAI Gym .
El éxito de las aplicaciones industriales del Deep Learningdependerá de la disponibilidad de grandes cantidades de datos de calidad, de los recursos de computación disponibles y de su aplicación a problemas apropiados. La detección y clasificación de defectos o averías, el modelado de sistemas para su control y la detección de anomalías podrían ser las primeras aplicaciones prácticas exitosas.









{kind=link}