América Latina y el Caribe (ALC) es la región en desarrollo con la más alta tasa de urbanización del mundo. Su población urbana ha pasado de ser el 41% en 1950, al 80% en 2010. Su actividad económica se concentra en sus centros urbanos (60% – 70% del PIB regional). Sin embargo, a pesar de su capacidad en la generación de riqueza, casi el 70% de las personas que viven en estas ciudades lo hacen en condiciones de pobreza. Si a lo anterior sumamos el impacto de las ciudades sobre el medio ambiente y la alta vulnerabilidad de sus urbes al cambio climático, a los desastres naturales y a las limitaciones financieras, nos obliga a reflexionar sobre la sostenibilidad en su desarrollo urbano.
La teoría del desarrollo tradicional postula que la industrialización conduce a una brecha entre la productividad laboral urbana y la rural, reflejando a su vez una diferencia salarial entre las dos áreas y promoviendo con ello la migración rural-urbana. Simultáneamente, esta teoría justifica mejores indicadores de bienestar para los residentes de centros urbanos en comparación con los habitantes de las zonas rurales, pues disfrutan de una mayor cobertura en servicios públicos e ingresos más altos. Sin embargo, esta teoría no se refleja en el patrón de desarrollo de los países de ALC ni explica por qué presentan niveles de urbanización sustancialmente mayores que otras regiones del mundo. El crecimiento de la población urbana en ALC tampoco ha redundado necesariamente en mejores condiciones de vida para sus habitantes.
Es así como las ciudades, y mucho más aún las de ALC, están formadas por sistemas complejos e interdependientes que han dado pie a un nuevo concepto de sostenibilidad. Este nuevo enfoque va más allá de lo ambiental, e incluye variables culturales, políticas, institucionales, sociales y económicas. Se requiere, por tanto, el desarrollo de metodologías que estudien las ciudades como un sistema holístico, complejo y multisectorial, que nos permitan una comprensión cualitativa y cuantitativa de los problemas de desarrollo y gestión urbana de la región.
De este desafío nace el concepto de “ciudad inteligente” o Smart City. En CARTIF lo interpretamos como un nuevo modelo de ciudad fundamentado en tres conceptos básicos: calidad de vida, sostenibilidad e innovación que implica, en algunos casos, el empleo de tecnologías de la información y las comunicaciones (TICs) pero, principalmente, la definición de modelos territoriales sostenibles y cohesionados con objetivos medioambientales, sociales, económicos, territoriales y administrativos. Como resultado, se obtienen ciudades más inteligentes y eficientes en el uso de recursos, reduciendo costes y ahorrando energía, mejorando los servicios proporcionados y la calidad de vida, y reduciendo la huella medioambiental. El fin último de estas ciudades inteligentes no es, ni mucho menos, presumir de sus avanzados sistemas e innovaciones, sino mejorar la calidad de vida de los que viven en ellas y, en un futuro, anticiparse a sus necesidades y solventar los problemas que acarree cada imprevisto que pueda surgir.
En este sentido, CARTIF lleva años trabajando para ayudar a transformar “ciudades tradicionales” en “ciudades inteligentes y sostenibles” en Europa y, más recientemente, también en ALC.
Nuestro modelo busca una regeneración urbana eficiente e integral que logre alcanzar los objetivos sociales, económicos y ambientales que emanan de las prioridades específicas de cada ciudad, integrando para ello soluciones tecnológicas innovadoras en los diversos escenarios urbanos, con amplia participación ciudadana, creando las bases de un ecosistema de negocios que facilite el despliegue de proyectos piloto y su posterior escalado y expansión.
En los próximos años esperamos ver ejemplos de este nuevo modelo de ciudad en muchas ciudades de ALC. Por lo pronto, CARTIF ha conseguido involucrar a la ciudad de Medellín (Colombia) en un proyecto financiado por el Programa de investigación e innovación Europeo H2020, con el cual se buscan nuevas estrategias para renaturalizar las ciudades a través de soluciones basadas en la propia naturaleza. Con esta participación, Medellín contará con la colaboración de expertos para, en primera instancia, identificar las barreras económicas, sociales y normativas que impiden desplegar este tipo de proyectos integrales en la ciudad.
Cuando circulamos por las carreteras nuestra seguridad depende del estado del pavimento. La información en tiempo real proporcionada por sensores embebidos puede ayudar a tomar medidas antes de que se produzcan situaciones de deterioro (riesgo). Una cuestión interesante respecto a la tecnología de sensorización es ¿cómo proveer de energía a estos sensores autónomos? La respuesta actual pasa por elegir entre dispositivos piezoeléctricos o transmisión eléctrica inalámbrica
El objetivo fundamental del pavimento de las carreteras es prestar a los usuarios un servicio de calidad que satisfaga sus necesidades de movilidad durante el tiempo de vida para el que sea concebido. Una situación de deterioro, genera un mayor riesgo de sufrir un accidente, más incomodidad en la conducción, más gasto de combustible, más deterioro del vehículo, más emisiones nocivas a la atmósfera…
La Asociación Española de la Carretera (AEC) ha publicado en mayo de 2016 el informe «Necesidades de inversión en conservación«, destacando cómo el estado de conservación de las vías en nuestro país continúa empeorando. De seguir esta tendencia, antes de 2020 será necesario reconstruir buena parte de la red.
Coincido con los expertos en que la conservación de nuestras carreteras no puede dejarse en manos del azar: ni depender de que situaciones de crisis obliguen a reducir el presupuesto, ni esperar a la aparición de situaciones irreversibles.
En estas circunstancias, se hace más necesario seguir desarrollando nuevas tecnologías y metodologías que apoyen la gestión de infraestructuras y que permitan conservar y rehabilitar nuestra red viaria al menor coste económico y medioambiental.
Instrumentación con sensores embebidos en el firme
El tráfico y las condiciones ambientales/meteorológicas, agravadas por los problemas relacionados con el cambio climático, afectan significativamente al deterioro del firme de nuestras carreteras.
El número de ejes, la carga por eje, la velocidad de circulación de los vehículos… afectan al comportamiento estructural del firme. La radiación solar, la lluvia, los gradientes térmicos, los ciclos hielo-deshielo, las sales fundentes empleadas contra el hielo o el derrame de aceites y combustibles, entre otros factores, tienen un impacto significativo en la vida del pavimento y en su fatiga.
Es necesario un mantenimiento preventivo basado en información del estado del firme y encaminado a prevenir la aparición de este deterioro o a subsanarlo rápidamente mediante actuaciones de reparación y mantenimiento.
Para evaluar el estado de un firme se emplean, habitualmente, la inspección visual y la auscultación periódica. Una alternativa dinámica es la instrumentación consensores embebidos en el firme. Con la monitorización continua, se pretende que quienes toman las decisiones puedan conocer, en tiempo real, el estado del firme.
Experiencias como las del proyecto CENIT OASIS, en las que colaboramos con OHL Concesiones y GEOCISA, avalan esta alternativa -no exenta de dificultades- como que los sensores superen las condiciones agresivas durante el extendido y la compactación, o alimentar los sensores durante el tiempo de vida de un pavimento asfáltico que se sitúa entre los 20 y 30 años.
En este segundo aspecto, como no siempre se dispone de alimentación eléctrica cableada o para superar los problemas de la flexibilidad del cableado, un reto tecnológico significativo, es empotrar en el pavimento sensores autónomos, con alimentación no cableada y comunicación inalámbrica ¿Cómo proveer de energía a los sensores sin cables y durante el tiempo de vida del pavimento?
¿Dispositivos piezoeléctricos vs. alimentación inalámbrica?
Frente a la alimentación con baterías que, al tener una energía limitada, requieren una sustitución periódica o una recarga, se puede alimentar los sensores autónomos con energía captada de la propia carretera, por ejemplo, mediante dispositivos piezoeléctricos.
A finales del siglo XIX, los hermanos Pierre y Jacques Curie denominaron «efecto piezoeléctrico» al fenómeno que ocurre en determinados cristales que al ser sometidos a presión o a un movimiento mecánico, generan energía eléctrica. En la carretera, parte de la energía del vehículo se convierte en deformación vertical del firme que se puede transformar en energía eléctrica mediante los dispositivos piezoeléctricos. La cantidad de energía generada depende del número de vehículos que pasen.
En el proyecto CIEN REPARA 2.0, en el que estamos trabajando actualmente, hemos optado por otro camino. Estamos investigando en colaboración con Sacyr Construcción, Acciona Infraestructuras, Repsol, Fractalia, CHM, Cemosa, Solid Forest e Inzamac, la recarga de las baterías de los sensores autónomos mediante transmisión eléctrica inalámbrica.
También a finales del siglo XIX, Nikola Tesla propuso lo que se conoce como “efecto Tesla”. En este caso, las variaciones en el flujo magnético tienen la capacidad de transmitir electricidad a distancia sin necesitar soporte sólido o algún tipo de conductor. En la carretera, periódicamente se recargarían las baterías de los sensores según sus necesidades de potencia (principalmente definida por la transmisión de datos). La transferencia de energía tiene un alcance limitado.
La eficiencia de ambas tecnologías es, ahora mismo, un aspecto crítico.
¿Curie vs Tesla? Realmente, enfrentar estas tecnologías (utilizar “versus” con el significado de “contra” o “frente a”) no es una expresión afortunada. Ambas tecnologías abren un mundo de oportunidades para nuevas aplicaciones, pero ¿son también complementarias? ¿qué opináis?
En este post me gustaría retomar el tema de las carreteras con suelo radiante, con el fin de profundizar un poco más en el beneficio que puede tener calentar los puntos más críticos de la carretera.
Como ya indiqué, la solución actual para evitar y eliminar la formación de hielo en las carreteras es la aplicación de fundentes, lo que todos conocemos como “sal de carretera”. En mayor o menor medida, esta sustancia es cloruro de sodio, un producto barato y efectivo. Me gustaría pararme aquí para que hagamos una pequeña reflexión, ¿realmente somos conscientes del daño que estamos haciendo empleando estas sustancias? Seguramente no; de ahí que la mayor parte de la gente se alegre cuando ve echar la sal.
Anualmente se esparcen millones de toneladas por nuestras carreteras, a menudo, sin una distribución apropiada a la calzada y con una frecuencia excesiva. Por esta razón me gustaría destacar alguna de sus nefastas consecuencias:
La vegetación próxima a la calzada es la primera en sufrir los efectos negativos de estas sustancias. Por un lado, las altas concentraciones de cloruro lo convierten en un elemento tóxico, causando el dorado o quema de las hojas y, por otro, las altas concentraciones de sodio pueden afectar al crecimiento de las plantas al alterar la estructura del suelo, la permeabilidad y la aireación.
Una proporción importante de la sal es arrastrada por el agua de lluvia llegando a acuíferos, embalses, ríos, humedales, etc. Esto provoca un aumento drástico del riesgo de contaminación de delicados ecosistemas e incluso en muchos casos, del agua que bebemos.
La sal afecta en gran medida a la salud de la fauna silvestre desde dos puntos de vista: por las graves consecuencias de su consumo dada su toxicidad, en especial las aves, y por la frecuencia de atropellos, dado que la sal atrae a los animales para su ingestión.
Otro punto que apenas tenemos en cuenta es el suelo, a pesar de que su degradación es un problema grave para Europa. La sal reduce la estabilidad del suelo, modifica su conductividad eléctrica, disminuye su pH y en general, perjudica seriamente su fertilidad.
Como podemos ver, el impacto medioambiental de estas sustancias es muy grande, por lo tanto, deberíamos tratar de hacer un esfuerzo para minimizar su efecto, utilizando toda la tecnología que esté a nuestro alcance para conseguir un mantenimiento invernal menos agresivo.
Una solución parcial sería poder medir en tiempo real la cantidad de fundentes en cada punto de la carretera, no solo en un punto fijo. Esto solo se conseguiría embarcando los sensores en los vehículos de intervención y mantenimiento. En la actualidad existen algunos sistemas en fase de desarrollo que miden la salpicadura de la rueda, midiendo el índice de refracción del agua (Japan Highway Public Corporation) o la conductividad eléctrica (Universidad de Connecticut). Dados sus resultados, en ningún caso han sido incorporados al mercado.
En CARTIF, con la colaboración de la empresa Collosa, estamos investigando el desarrollo de este producto. Nuestros principales objetivos son evitar esparcir más sal cuando las cantidades actuales son suficientes, echar solo la cantidad necesaria en el lugar preciso que lo necesite (dado el sistema de posicionamiento global de estos dispositivos) y dotar al responsable del mantenimiento invernal de una herramienta objetiva sobre la que basar sus decisiones de intervención.
En CARTIF apostamos por una solución definitiva que evite, en lo posible, dispersar los fundentes. Si conseguimos atacar a tiempo el problema en los puntos más peligrosos, previniendo y evitando la formación de hielo, evitaremos la salida del camión para cubrir de fundentes dichos puntos. Además, esta salida no solo cubrirá los puntos peligrosos, sino que, ya que sale, esparcirá los fundentes por toda la carretera.
Esta solución es el desarrollo de un suelo radiantemás económico con mayor eficiencia energética, basado en energía geotérmica. Para ello es fundamental el desarrollo de una predicción inteligente que evite la formación del hielo y se base en el empleo de nuevas mezclas bituminosas.
Sin lugar a dudas, esto supondrá una reducción importante del impacto medioambiental que supone la vialidad invernal de nuestras carreteras y en particular, en los puntos más delicados de nuestra geografía como los parques naturales.
Permíteme recordarte que Europa es el continente que cuenta con el más diverso, rico y numeroso patrimonio cultural de todo el mundo. 609 millones de turistas visitaron en 2015 el “viejo continente” (29 millones más que en 2014) según la Organización Mundial del Turismo, y, aunque resulte un tanto pretencioso, se sugiere que el 37% de esos turistas son turistas culturales, cifra que crece un 15% cada año. Esta “curiosa especie” que deambula por las ciudades tiene la imperiosa necesidad de visitar el patrimonio cultural construido del lugar y participar en eventos culturales.
Estoy de acuerdo con que hablar de los inmuebles históricos como recursos turísticos tiene un punto “mezquino” al considerarse el Patrimonio como elemento integrador e identificador social totalmente intangible, pero igual de cierto es que es un recurso económico y sólo haciendo caja se asegura su sostenibilidad. De esta manera se fijan y crean miles de empleos, que a su vez refuerzan ese carácter de vertebrador social que tiene y que incluso permite mejorar la calidad de vida de los ciudadanos.
Precisamente por esto el sector público viene dando un empujón a la creación de más y más atracciones culturales con el patrimonio construido como escenario. El turismo cultural se percibe como la principal fuente de financiación para la preservación de los inmuebles, al generar los turistas los recursos necesarios para su mantenimiento y restauración. Veremos si esto es realmente así en los próximos años, porque según el informe Richards, ahora mismo existe una oferta muy superior a la demanda.
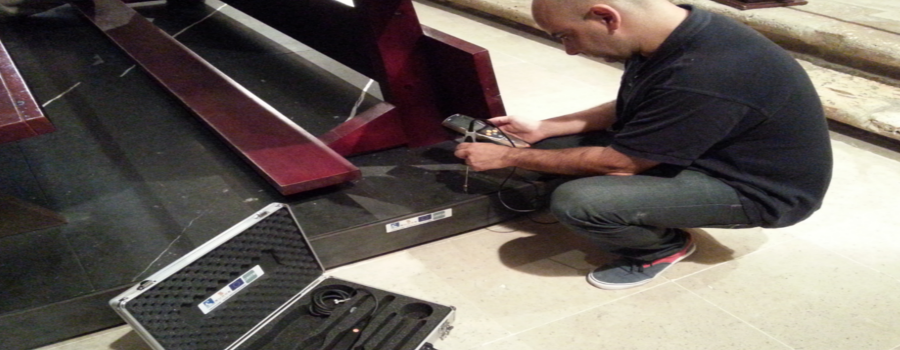
Asegurar la protección y la preservación de nuestro patrimonio cultural construido es, hoy por hoy, más urgente que nunca. No ya sólo como “presa” del turismo cultural, y no ya sólo también como marca de territorio (incluyendo al ciudadano), sino por su vulnerabilidad a la contaminación, el cambio climático y las presiones socioeconómicas. Todos estamos malos de vez en cuando y sabemos que, aunque no lo hagamos, siempre es mejor prevenir que curar. Pues lo mismo le ocurre al patrimonio cultural construido: es tan deseable como importante disponer de sistemas automáticos que continuamente nos indiquen cómo se encuentran los inmuebles culturales, previniendo males antes de que estos sean tan costosos como irreparables. Como cuando un médico nos ausculta. Ahora bien, ¿qué necesitamos auscultar? En el argot técnico decimos “monitorizar”, y para ello se utilizan sensores de muchos tipos, pero principalmente registran tres aspectos:
La temperatura y la humedad relativa. Ambas siempre están ligadas (de hecho la segunda es inversa de la primera). Cualquier bien cultural tiene una cantidad mayor o menor de vapor de agua a una temperatura determinada, lo que influye decisivamente en la estabilidad físico-química de los materiales de que están hechos. Inadecuadas condiciones de temperatura y humedad producen deformación y rotura; oxidación y corrosión; así como biodeterioro (aparición de microorganismos).
Luz natural y artificial. La iluminación puede ser de origen natural (el sol), o artificial (fuentes eléctricas), pero independientemente de su origen es una radiación electromagnética que cubre fundamentalmente los rangos ultravioleta (UV), visible (VIS) e infrarrojo (IR). En conjunto provocan fotodegradación (decoloración) y aumento de temperatura, sobre todo en materiales orgánicos (pinturas, textiles, libros y documentos).
Contaminantes. La composición y calidad del aire se ven alterados por compuestos que provienen en su mayoría de la utilización de combustibles fósiles (tráfico rodado, calefacciones de los edificios y actividades industriales). Estos compuestos pueden desencadenar reacciones químicas que afectan a los materiales provocando corrosión; manchas y costras; y también biodeterioro.
Iremos desglosando particularmente estos parámetros en posts sucesivos.
En cualquier caso el papel de centros tecnológicos como CARTIF es decisivo para dar un pasito más en los desarrollos técnicos necesarios para hacer que la monitorización pueda hacerse a coste admisible y de forma totalmente compatible con la estética y la funcionalidad del lugar. Proyectos de referencia internacional en este sentido en que CARTIF está jugando un importante papel son:
Tras Italia y China, España es el país del mundo que atesora el mayor número de bienes patrimonio de la humanidad. Además, somos un destino turístico mundial de primer orden, con una componente cultural en alza. Jugando en casa, Castilla y León acapara el 60% del patrimonio español… ¿Nos ponemos las pilas?
¿Para qué sirve la digitalización 3D en infraestructuras? Para inspeccionar revestimientos, detectar grietas, inventariar y sensorizar túneles y otro tipo de estructuras. En este vídeo te contamos lo que hacemos en CARTIF:
David Olmedo y José Llamas, investigadores de CARTIF.
Con los sistemas de posicionamiento global ha ocurrido un fenómeno similar a lo que ha pasado con los teléfonos móviles: en unos años hemos pasado de no que no existieran a considerarlos imprescindibles. Lo cierto es que, de hecho, la geolocalización es una de esas tecnologías que ha propiciado el desarrollo de multitud de aplicaciones y en muchos ámbitos ya no se concibe poder trabajar sin el uso del comúnmente llamado GPS.
Este tipo de sistemas de posicionamiento se basa en recibir la señal de tres o más satélites por medio de la trilateración inversa: determinando la distancia a cada uno de los satélites se obtiene la posición en coordenadas absolutas (normalmente WGS84).
Los sistemas de posicionamiento global basados en satélites tienen su origen en los años 60, en el sistema norteamericano TRANSIT. Con este sistema se podía conseguir fijar la posición una vez cada hora (en el mejor de los casos) con una precisión de unos 400 metros. A este sistema le siguió el Timation y en el año 1973 comenzó el proyecto Navstar (ambos norteamericanos). El primer satélite de este proyecto se lanzó en febrero de 1978 hasta completar la constelación actual, a la que se declaró con plena capacidad operacional en abril de 1995. Este sistema Navstar-GPS es el origen del nombre genérico GPS que solemos aplicar a todos los sistemas de navegación global. En 1982 la antigua Unión Soviética lanzó los primeros satélites de un sistema similar llamado GLONASS que comenzó a estar operativo en 1996. Por su parte, la República Popular China lanzó en el año 2000 el primer satélite de su sistema de navegación BeiDou, que está previsto que esté plenamente operativo en el 2020. Por último, en 2003, comenzó el desarrollo del sistema de posicionamiento de la Unión Europea denominado Galileo, con un primer lanzamiento en el 2011. Actualmente cuenta con 12 satélites en activo (y 2 en pruebas) y está previsto el lanzamiento simultáneo de otros cuatro el próximo 17 de noviembre. De esta forma, habría 18 satélites en órbita y el servicio inicial del sistema de posicionamiento Galileo podría comenzar a finales de 2016. Se espera que esté totalmente operativo en el año 2020. Hay que decir que también existen otros sistemas, a nivel regional, complementarios a los ya comentados, en India y Japón.
Como se puede comprobar, los sistemas de posicionamiento global están plenamente extendidos y son ampliamente utilizados tanto a nivel militar y comercial (transporte de personas y mercancías, agricultura de precisión, topografía, estudios del medio ambiente, operaciones de rescate…) como a nivel personal (casi todo el mundo tiene un móvil con GPS disponible, aunque otra cosa es que siempre se les acabe la batería en el momento más inoportuno).
Respecto a la precisión obtenida con los equipos de geolocalización actuales, es del orden de unos pocos metros (e incluso algo mejor con el sistema Galileo) y se puede llegar a precisión centimétrica usando dispositivos multifrecuencia y aplicando correcciones diferenciales.
Uno de los problemas de estos sistemas es que no funcionan correctamente en interiores ya que la señal de los satélites no se puede recibir bien dentro de los edificios (aunque ya existen equipos de alta sensibilidad que reducen este problema y otros dispositivos llamados pseudolites, que actúan simulando la señal GPS en interiores). Y como ya no nos basta con conocer nuestra posición exacta en exteriores, ahora surge la necesidad de conocer el posicionamiento también en los interiores de grandes edificios e infraestructuras (aeropuertos, edificios administrativos, centros comerciales…).
Por tanto, han aparecido sistemas de posicionamiento en interiores (IPS) que permiten la localización dentro de espacios cerrados. A diferencia de los sistemas de posicionamiento globales, en este caso existen muchas tecnologías diferentes que además no suelen ser compatibles entre sí, lo que dificulta su difusión y adopción por parte del público general. Ya existen soluciones muy fiables y precisas en entornos empresariales, pero estos desarrollos son específicos y difícilmente trasladables a un uso genérico de localización de personas en interiores. En este tipo de contexto profesional, CARTIF ha realizado varios proyectos de posicionamiento en interiores para movimiento autónomo de mercancías y robótica de servicios. No existe en la actualidad un sistema estándar de posicionamiento en interiores pero hay muchas tecnologías compitiendo por un lugar predominante.
Las tecnologías utilizadas se pueden diferenciar en la necesidad o no de una infraestructura de comunicaciones. Aquellas que no necesitan de infraestructura existente se suelen basar en el uso de sensores habitualmente disponibles en un teléfono móvil inteligente (smartphone): variaciones del campo magnético en el interior del edificio que son detectadas por los magnetómetros, medición de los movimientos realizados en el recinto empleando los acelerómetros o identificando ciertos elementos característicos (como códigos QR) usando la cámara. En todos estos casos la precisión alcanzada no es muy alta pero podría ser de utilidad en ciertas aplicaciones sencillas como orientarse en un gran edificio.
Los sistemas de posicionamiento en interiores que usan infraestructura de comunicaciones emplean casi todas las tecnologías disponibles de este tipo para obtener la localización: WiFi, Bluetooth, RFID, infrarrojos, NFC, ZigBee, banda ultra ancha, luz visible, antenas de telefonía (2G/3G/4G), ultrasonidos…
Con estos sistemas se determina la posición, normalmente por triangulación, calculando la distancia a los dispositivos fijos de referencia (usando la intensidad de la señal recibida, señales codificadas o por medición directa de dicha distancia). Así, se puede llegar a alcanzar mayores precisiones que en los tres casos anteriores. También existen nuevos desarrollos que combinan varias de las tecnologías mencionadas para conseguir mejorar la precisión y disponibilidad del posicionamiento.
Aunque, como se ha dicho no hay un estándar, se está extendiendo el uso de nodos basados en bluetooth de bajo consumo (BLE). Ejemplos de estos sistemas son el Eddystone de Google y los iBeacons de Apple.
Lógicamente, como en el caso de posicionamiento en exteriores, además de conocer la posición hay que disponer del correspondiente mapa del entorno que permita la navegación. Existen también otros sistemas, llamados SLAM, que van generando mapas del entorno (que puede ser conocido o no) según se van moviendo, muy usados en robots y vehículos autónomos. Un ejemplo reciente es el proyecto Tango (también de Google) que permite generar modelos 3D del entorno utilizando dispositivos móviles (smartphones o tablets).
Como se ha visto, cada vez estamos más cerca de poder estar localizados en cualquier lugar, lo cual puede resultar muy útil pero también nos puede hacer excesivamente dependientes de estos sistema (cada vez se pregunta menos en la calle cómo llegar a un sitio) a la vez que se incrementan los consabidos problemas de privacidad asociados a estos temas. Así que, aunque gracias a estos avances cada vez sea menos necesario el sentido de la orientación, lo que no hay que perder nunca es el sentido común.