Innovation isn´t just about having a good idea. It´s about fighting for it when nobody does. It´s about shaping it when it´s still intangible, about falling a hundred times until, suddenly, something starts to shine.
We tend to think when we talk about innovation, that thanks to the emergence of a brilliant idea we´ve solved that small goal or problem or, on other occasions, a huge problem that can transform the world. The truth is that no brilliant idea goes very far unless it´s achieved by people who, with great effort and perserverance, manage to “materialse” that brilliant idea.
Innovations can emerge from any corner of an organization. Often, management levels find it easier to turn an intuition into a line of work, but it´s also common for a good idea to emerge from the technical team, production, quality, or even administration. The real challenge is ensuring that the idea survives all the obstacles involved in becoming a reality. And there are many obstacles, fromclose colleagues, managers who don´t support the idea because is more comfortable to remain in their comfort zone, to obtaining internal or external financing. In other words, the challenge of innovation often lies in surviving the effort of going from an idea to a clear reality.
“The challenge of innovation often lies in surviving the effort of going from an idea to a clear reality”.
History is full of brilliant ideas that died for lack of perseverance. But it´s also full of projects that were born, not beacuse they were obvious or perfect, but because someone insisted beyond reason. Rarely do these ideas and the people behind them change the worl as we know it (disruptive innovations1).
To illustrate with real-life examples how brilliant ideas change the world, let´s talk about one of the most shocking stories of innovation: the 2014 Nobel Prize in Physics awarded to Isamu Akasaki, Hiroshi Amano and Shuji Nakamura for the invention of the BLUE LED. That small invention allows us to have thin LED screens today, and thanks to which you can read this from your laptop, mobile phone or tablet (there are several more applications thanks to this invention)
Source: La Vanguardia. https://www.lavanguardia.com/ciencia/20141007/54416831597/nobel-fisica-2014-akasaki-amano-nakamura.html
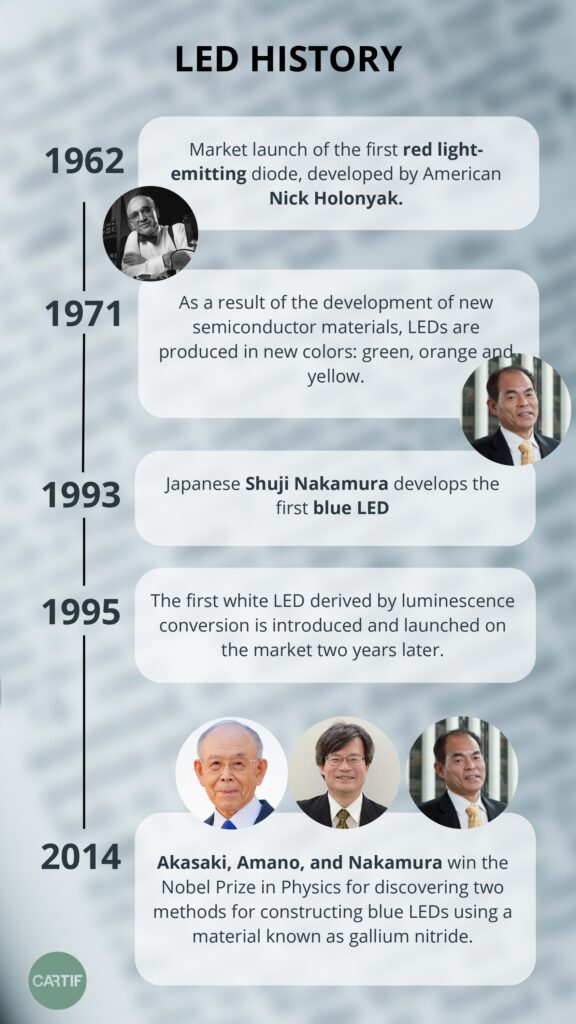
BLUE LED History
For decades, red, green and yellow LEDs were achieved. But not blue. And without blue, efficient white light, LED displays, and low-consumption projectors couldn´t be created. The world´s leading companies and research centres tried and failed. It was simply too difficult.
The challenge lay in the base material. Gallium nitride (GaN) was the best option, but it was very complex to synthesize and dope. The crystals were defective. The light emission was unstable. Many tried and all gave up.
All except three people: Isamu Akasaki, Hiroshi Amano y Shuji Nakamura.
Akasaki and Amano, from Nagoya University, began experimenting in the 80´s.
Nakamura, an engineer at a small Japanese company called Nichia Corporation, continued his research almost self-taught, against the advice of those around him.
For years, they worked with limited resources, without visibility, suffering constant failures and rejection from the scientific community. But they persisted.
In 1993, Nakamura finally succeeded in developing the first highly efficient, commercially available blue LED. That blue light not only changed lighting, but also paved the way for new sustainable and more efficient technologies. In 2014, the three received the Nobel Prize in Physics for an innovation that took 30 years to see the light of day… literally.
I would encourage you to reread the story of this invention in more detail, because it truly is a great example of how perseverance and effort can literally change the world for the better. Furthermore, we can learn valuable lessons from this story:
Most companies abandon an idea if there are no results within six months. The blue LED took more than a decade to work, and decades to be recognized.
Understand innovation as a marathon, not a sprint.
True innovation requires more effort than genius.
Innovation must be sustained, even when there are no results.
“In organizations, we should value those who persist with rigor and conviction. Not all ideas are going to change the world, but many that would never do so because no one fights hard enough for them. Like the blue LED, perhaps your company’s next great innovation isn’t in the most visible idea, but in that person who keeps believing in it, even when everything else fails.”
Because in the end, innovation isn’t just about being right, it’s about having the determination to prove it when no one else sees it.
1. Disruptive Innovations
A process by which products, services, or business models are introduced that radically transform an existing market, creating new ways of satisfying needs or even creating entirely new markets
Have you ever tried a car racing game? An F1 race, a rally, or if you`ve tried driving Assestto Corsa, maybe you know where I am going with this little reflection.
If you have ever done so, you will have experienced a sense of “realism” of behaviour . In fact, if you have tried any driving simulator, you will have noticed the degree of detail and realism inthe behaviour of the simulation, being able to recreate to perfection, from different engine power and power delivery, weight distribution and vehicle dynamics. It is even able to recreate the type of surface on which the car is driving, which implies differences in behaviour, as is logical due to irregularities and different friction factors, etc. We could speak of digital twins, digital representations that are faithful to reality and that behave imitating the real case in the physical world.
Such is the degree of fidelity to reality, that the teams that spend the most moeny in the world to train their drivers, the F1 teams, train on virtual simulators (actually mixed, as the simulator is capable of transmitting dynamics to the driver).
The same could be said of airline pilots, who train for hundreds of hours on simulators that represent, with a very high degree of detail, the dynamics associated with flying an aircraft.
Figure 1. Image of a F1 simulator. Source: Fbrand
In industry, too, these virtual environments representing factories and their internal processes, known as digital twins, are being realised at an increasingly precise level of detail. And more and more companies, both on the customer side and on the side of the automation supplier, are implementing both the automation of a plant or process and simultaneously the digital twin. This is due to the benefits that can be obtained by having these tools available. For example, better decision making thanks to the possibility of prior simulation, flexibility and speed when implementing changes, more information in real time, improvements in maintenance.
If we train people on simulators and we emule processes and factories, can´not we do the smae with robots? Indeed, i think so.
If you have ever been involved in engineering in general, or in manufacturing processes, you will know that nowadays, the design of a product (service, building, road…) is done using specific design software, be it Autodesk, Blender or whatever, but it is done digitally.
Think of something you know perfectly well, a car. Because each and every one of its thousands of parts, whether they are in-house or supplied by suppliers, are correctly dimensioned (geothermally) and defined (properties, composition, materials…) digitally, both in 2D and 3D. If you integrate all the individual information in the concept, ‘car’, you would have there, the famous digital twin.
Now, extrapolating to a robot manufacturer (in this article, we are referring to service robots, not industrial robots), obviously although it is not as big an industry (as of today) and with as much baggage as the automotive industry, the design and manufacturing processes in the industry in general are very similar (in more incipient and modern industries, new trends are also integrated more quickly, primarily because of the size and culture), we can intuit that these companies may have or have a digital twin of their final product. With all the positive aspects that this entails for the company.
Figure 2. Virtual room for monitoring of assistive Robots
Well, at this point, you may ask, what does this have to do with Carlos Sainz training in a simulator? The answer is obvious, just as we train people to improve their skills using virtual environments, we are going to be able to train robot robots in such environments, with the great advantages that this entails. You will quickly see what I mean.
To train these robots, one of the techniques used is through the use of AI, putting the robot in a physical environment and trying to execute the tasks necessary to achieve the objective for which it has been programmed, and through deep learning, this robot learns to perform its mission better and better. For example: UNITED KINGDOM : Unveiling a robot that “learns on its own”.
Now, don’t just think of a simple robotic arm that performs simple tasks, and imagine more ‘futuristic’ robots, as in the illustration below (this is a commercial robot as of today).
Figure 3. Boston Dynamics robot.
If we have the digital twin (the most realistic and fully defined) of the robot, and we can recreate virtual environments that faithfully recreate physical environments, such as a city, a forest or the moon if you like. We will be able to train our robot in tasks and environments that could not be done otherwise (or would be more expensive, dangerous or outright impossible).
A couple of examples, a bit extreme, to make it easier to understand: We can recreate an area hit by a natural disaster and train these robots in rescue tasks. Or we can recreate Mars with its atmosphere, temperatures, gravity, terrain, etc., and see how the robot would behave in that environment.
Once the model is fully trained and satisfies the needs, the control model of the robot can be downloaded to the physical model. It can be trained as we have seen for events that have not yet happened. In this way, construction, material or design faults can be detected and fixed in the digital model, to check the effectiveness of the solution and subsequently improve the production process.
From the manufacturer’s side, the advantages of the digital twin and these training environments are clear. Flexibility, cost, time and risk savings, greater training capacity, greater customisation of the solution for the end customer, etc.
And for the end user, it would be very good, being able to train robots on specific tasks before they have to perform them, possibility of retraining on new policies, higher degree of personalisation, better training between unexpected agents.
I believe that this way of working could become a standard in the future. It is possible that tomorrow we will be training space miners to collect minerals on asteroids. Or we may be training robots to grow algae at depth.
Who knows what exciting missions we will send pre-trained robots on in the not-so-distant future.
The world nowadays is immersed in a deep digital transformation change, whether we like it or not. Moreover, it seems the logical order of human evolution, because human development, is linked to technological development, since the “discovery” of fire, or the first rudimentary tools, till the outbreak of Internet or the spatial exploration. This change process, or better said revolution, not only concerns individuals, but also involves companies, that are completely immersed in this revolution for years: the 4th industrial revolution.
“We are on the brink of a technological revolution that will fundamentally change the way we live, work and interact. In its scale, scope and complexity, the transformation will be unlike anything that humankind has ever experienced before”
– Klaus Schwab, author of “The fourth industrial revolution” –
Within this revolution there are several key aspects, one of them being digital transformation. A concept that many people associate with digitalisation, a fundamental part of digital transformation, but which doesn´t capture this new, broader and more complex reality.
This term is often associated with the integration of digital tools such as a CRM (Customer Relationship Management), an ERP (Enterprise Resource Planning) for production management,etc. But in reality, is a much broader concept, which can be defined as a process that consists of orienting business activities towards the application of emerging technologies, and for this it is necessary to go through a process of cultural and organisational change and, finally, the application of new technologies throughout the organisation.
Therefore, we could differentiate the concept of digitalisation (implementing digital tools in certain processes) from that of digital transformation, the latter being much broader, as it orients the company towards the implementation of new technologies and towards a change in the traditional way of working. Taking all of this into account, we can define Digital Transformation as the set of projects and tasks that allow the company to adapt to the new needs arising from the 4th industrial revolution. Tasks that must be orchestrated through a plan that encompasses the following aspects:
Change towards a digital culture.
Global training plan.
Organisational reorganisation plan.
Specific training plan.
Incorporation of new profiles.
Progressive technological plan.
Thanks to digital transformation companies achieve huge advantages proven to improve in a number of key business areas:
Generate new experiences for the client.
Improve the operative efficiency.
Generate new income sources.
Increase the quick response capacity in the face of changes in the market.
Create competitive advantages for the organisation.
Improve the internal collaboration.
Deepens the data analysis (Big Data).
One of the great revolutions of this digital transformation is Big Data and Artificial Intelligence. It should be borne in mind that in recent years, the amount of information available on the Internet has practically doubled every two years, and this trend will continue to rise. Thanks to this amount of information and new technologies such as artificial intelligence, machine learning, deep learning,etc. the world as we know it will change, as will the way we work, shop and relate to each other.
This new reality, which has become much more evident in the wake of the 2020 pandemic, has taught us that businesses that fail to cope with today´s rapid changes are doomed to disappear, just as species that failed to adapt to the melting of the last ice age did.
Today, digital transformation is not an option. Today, companies can no longer consider adapting to this new landscape, as there is no other way to renew themselves and increase competitiveness than by developing a digital transformation plan.
How can we help you from CARTIF?
At CARTIF we have committed ourselves to this task of helping companies, especially SMEs, which are the ones that have the most difficulties in this complex and changing world of digital transformation. Because we know first-hand that sometimes lack of time or lack of knowledge means that we do not make progress in these fundamental processes. That is why we have a plan to help you along the way. We have a Digital Transformation consultancy service that is completely free of charge for companies.
What this programme consists of?
After contact us for receiving information, we will send you a service request form, and once submitted:
We will visit or meet with the person reponsible in the company to carry out a diagnosis of the current situation, work methodology and digital tools used.
Based on this report, we will create a personalised action plan with different actions identified to improve the company´s competitiveness.
Finally, we will carry out a period of mentoring to accompany the company during the process.
These actions will allow the company to start or continue the digital transformation process generating a roadmap in order to be able to address it.