El Aneurisma de Aorta Abdominal (AAA) ha sido reconocido como un importante problema de salud en la última década. Las estadísticas asociadas con esta patología son preocupantes y, como se registra en la mayoría de los estudios encontrados en la literatura científica, se prevé que su incidencia se incremente en los próximos años debido fundamentalmente al aumento en la expectativa de vida de la población. La ruptura de los aneurismas de aorta abdominal representa un evento clínico muy importante debido a su alta tasa de mortalidad.
Como indicaba nuestro compañero Félix Nieto en su post anterior, los indicadores empleados actualmente para decidir el tratamiento a pacientes con aneurisma, son el diámetro máximo transversal y la tasa de crecimiento, pero, en algunos casos, pueden ser considerados insuficientes, pues no tienen una base teórica físicamente fundamentada. Debido a esta limitación, en años recientes las investigaciones han estado básicamente dirigidas a mejorar la comprensión sobre los fenómenos asociados al surgimiento y posterior evolución de esta patología, con el objetivo de definir si otras variables podrían ser predictivas de ruptura.
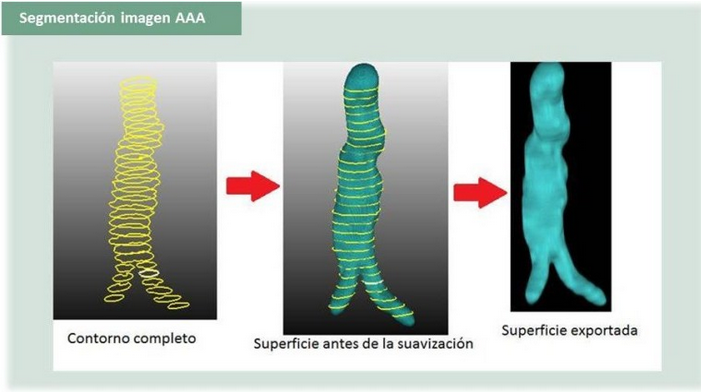
Una de las mayores restricciones en la obtención de resultados precisos en la modelización de patologías vasculares, es el uso de un dominio computacional realista, lo cual cada día se acerca más a lo posible, debido a los avances tecnológicos en el equipamiento para la realización de tomografía axial computadorizada (TAC), de resonancia magnética (IRM) y al desarrollo de técnicas CAD, lo que ha permitido avanzar significativamente en la extracción detallada, in vivo, de estructuras anatómicas.
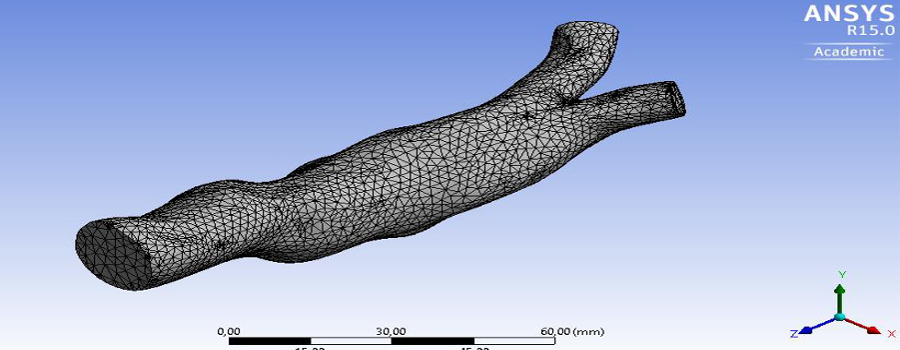
En este sentido, en CARTIF estamos trabajando en la conversión automatizada del conjunto de imágenes 2D obtenido mediante TAC en un modelo 3D realista y que constituya el dominio geométrico de integración en la simulación de AAA, mediante técnicas por elementos finitos.
La actividad relacionada con el tratamiento de imágenes médicas de AAA ha sido la base fundamental para uno de nuestros últimos proyectos: el estudio de la influencia de parámetros geométricos sobre el índice de ruptura de los AAA, enfocado particularmente al ángulo de las iliacas.
En una primera fase se han realizado simulaciones dinámicas de fluidos y estructurales para calcular el Índice Potencial de Ruptura (IPR) de varios casos de pacientes afectados por AAA
Los resultados obtenidos demuestran que los valores del ángulo de las iliacas (α) están relacionados con otros parámetros geométricos como la excentricidad del AAA y que en conjunto pueden caracterizar el IPR.
El siguiente paso será confirmar esta tendencia sobre una mayor base de datos de pacientes que presentan AAA, siendo imprescindible, como hasta ahora, la buena colaboración que tenemos con el Hospital Clínico Universitario de Valladolid.
Estamos convencidos de que los resultados de esta línea de investigación podrían ser una herramienta muy eficaz para el cirujano a la hora de tomar la decisión de someter o no el paciente al procedimiento quirúrgico de reparación. Para confirmarlo, seguiremos trabajando.
La medicina tiene un pilar fundamental en las herramientas que le brinda la ingeniería. La modelación matemática y computacional es clave para la generación de nuevas estrategias terapéuticas para el tratamiento de enfermedades. Detrás de muchos de los avances en medicina hay un fuerte desarrollo científico y tecnológico, que recae de una u otra manera en la ingeniería
Para la ingeniería, la salud siempre ha sido uno de sus objetivos en cuanto a la investigación aplicada. Desde el diseño y uso de tecnologías paracontrolar variables que afectan a la salud del ser humano, hasta el diseño y uso de tecnologías de control como apoyo a las ciencias de la salud. Un claro ejemplo de ésto es el avance en equipos de diagnóstico, prótesis, dispositivos de terapia, etc.
En CARTIF llevamos casi diez años investigando en una línea que refleja muy bien esta fusión de ambas disciplinas. Esta línea se ha enfocado en la mejora de los criterios utilizados por los médicos a la hora de predecir la ruptura de aneurismas de aorta abdominal, con el objetivo de identificar el momento idóneo para llevar a cabo la intervención quirúrgica desde el punto de vista de la ingeniería. En concreto, con la resistencia de materiales.
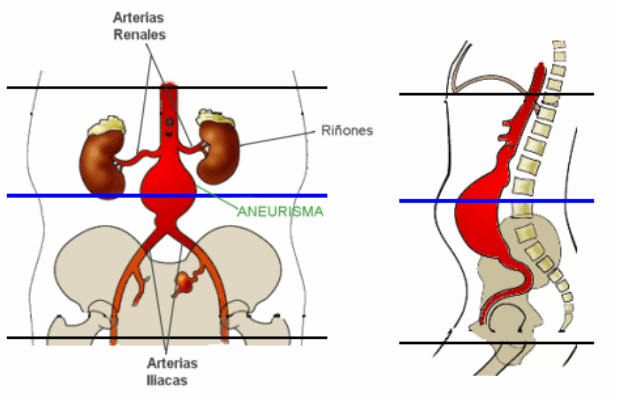
Un aneurisma de aorta abdominal es una dilatación irreversible de la pared de la aorta del segmento que transcurre entre la bifurcación de las arterias renales y las ramas de las arterias iliacas, afectando en ocasiones a estas últimas. El 70% son asintomáticos, y se detectan en estados avanzados, lo que hace más importante su evaluación de riesgo de ruptura.
La ruptura de los aneurismas de aorta abdominal (AAAs) es una de las principales causas de muerte en el mundo:
• El 8% de los mayores de 65 años y el 10% de los mayores de 80 años presentan un AAA. • Es la décima causa de muerte en mayores de 65 años en países occidentales. • Factores como el tabaquismo, la aterosclerosis, la obesidad, o la hipertensión aumentan el riesgo de padecer un AAA. • La ruptura de la arteria conlleva la muerte antes de llegar al hospital, en el 90% de los casos. • La tasa de mortalidad asociada a la intervención quirúrgica es del 5,8% para reparación quirúrgica abierta y del 1,7% para reparación endovascular.
Actualmente, se interviene quirúrgicamente cuando el aneurisma llega a 5 cm de diámetro máximo o su tasa de crecimiento es superior a 0,5 cm/año. El 24% de los aneurismas que rompen tiene un diámetro inferior al considerado como crítico. Por lo tanto, los actuales criterios clínicos empleados para evaluar el riesgo de rupturano pueden ser considerados como los predictores más fiables.
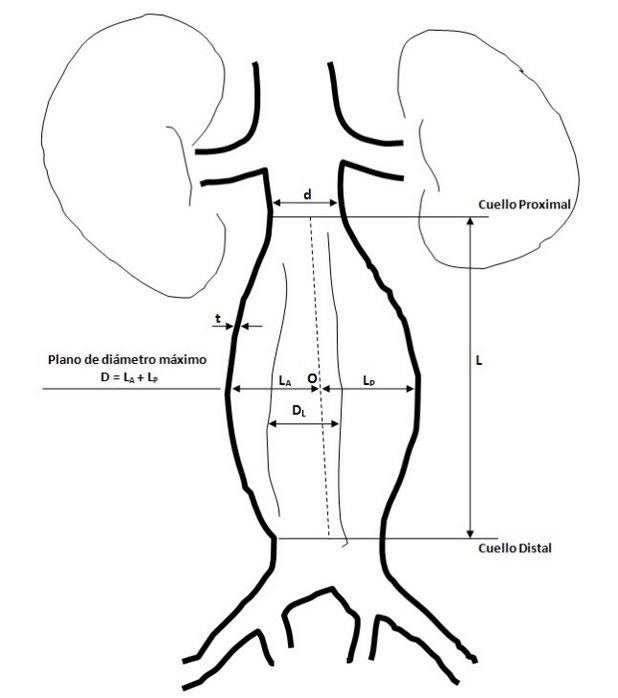
El equipo de CARTIF ha utilizado los principales parámetros geométricos de los AAAs: diámetro máximo, diámetro de la arteria sana, longitud, espesor de la pared y asimetría (forma geométrica). Estos parámetros pueden ser medidos de forma fácil por el médico a través de la tomografía axial computerizada, medio de diagnóstico utilizado por los médicos.
Estos parámetros se combinan entre sí de manera eficiente para generar la herramienta de evaluación del riesgo de ruptura. Esta herramienta se ha programado utilizando software libre y permite generar una base de datos para cada paciente, y dentro de la misma, ficheros con los datos de cada examen de seguimiento. Contiene un gestor gráfico que permite representar la evolución del Riesgo de Ruptura.
La herramienta, aporta una serie de sugerencias al cirujano, que toma la decisión más acertada sobre si es conveniente llevar a cabo la intervención quirúrgica o continuar con el seguimiento de la evolución del aneurisma.
Para comprobar que la herramienta era eficaz, se realizaron pruebas de validación sobre pacientes durante varios años. Los resultados mostraron que el método es capaz de estimar con fiabilidad el riesgo de ruptura de aneurismas, permitiendo identificar aquellos potencialmente peligrosos de romper, aun cuando su diámetro máximo sea menor que el usado por la comunidad médica en la actualidad, y permitiendo identificar aquellos casos donde la ruptura no se vaya a producir, evitando que el paciente se someta al procedimiento quirúrgico de reparación.
Con este trabajo se demuestra que la colaboración entre la medicina (liderada por el HCUV) y la ingeniería (liderada por CARTIF), es increíblemente productiva. Los resultados obtenidos permiten un gran avance con una aplicación eminentemente práctica y ponen de manifiesto la importancia que la investigación y la I+D tienen de cara a la sociedad.
En mi anterior post, publicado la semana pasada, hice una recopilación de las más interesantes definiciones del «Internet de las cosas» o ese «mundo conectado» al que todas las personas sin discriminación por razones económicas, sociales o de diversidad funcional deberían tener acceso.
La carrera por conectarnos a todo y a todos, en el mundo de la discapacidad, la va ganando el llamado “hogar conectado” y todo lo referente a orientación y movilidad tanto en interiores como en exteriores. Estos dos aspectos facilitan en gran medida la independencia de las personas con discapacidad en el hogar, en el trabajo o en la calle.
En el marco del “hogar conectado”, las opciones para aplicar Internet de las Cosas en la mejora de la calidad de vida son muy amplias. Veamos algunos ejemplos:
•El sistema de iluminación Philips Hue facilita la comunicación a personas con discapacidad auditiva, mediante el uso de luces para notificar diferentes señales y avisos sonoros que ellos no pueden escuchar. Este sistema proporciona una plataforma de software abierto, lo que facilita su uso desde aplicaciones externas adaptadas a cada usuario.
•Marcas como Bosh o Miele, anuncian la inclusión de inteligencia y conexión con smartphones en sus electrodomésticos, tanto para su control como para ofrecer otro tipo de servicios (recetas, lista de la compra). El control de electrodomésticos a distancia, incluso por voz, puede ser una gran ventaja para personas con dificultades motoras para las que el uso de los mandos convencionales pueda ser un problema.
En CARTIF tenemos experiencia con este tipo de aplicaciones. En uno de nuestros proyectos sobre IoT, recientemente terminado, desarrollamos la posibilidad de que los electrodomésticos se adapten a los gustos de los usuarios de manera automática, sólo con que éstos últimos expresen su opinión. Los electrodomésticos de usuarios con perfiles similares se comunican entre ellos para compartir recetas que son combinadas por la propia máquina en función de cada usuario. SANDS, como en el caso anterior, permite la configuración y puesta en marcha de los electrodomésticos desde una aplicación en red. Contribuyendo así al desarrollo del «hogar conectado»
La adaptación automática de las recetas, podría ayudar a personas con discapacidad cognitiva o problemas de memoria, a utilizar los electrodomésticos según sus gustos sin tener un amplio conocimiento de los comandos.
Para facilitar la movilidad y la orientación tenemos proyectos como:
• La silla de ruedas de AT&T y Permobil, con conexión inalámbrica. El usuario comparte información sobre su estado y situación a través de una nube segura. También puede modificar aspectos como la posición de la silla.
• Sistemas de búsqueda de aparcamiento, como el de Viarium Technology, proporcionan información a personas con movilidad reducida sobre aparcamientos libres adaptados.
• Danok, aplicación de Konectik que utiliza los sensores de la tecnología iBeacon para proporcionar información sobre el entorno. Esta aplicación es especialmente útil para personas ciegas y para personas con discapacidad cognitiva.
• Proyecto Kango de Aditium. Realiza un seguimiento, mediante tarjetas NFC de los escolares durante su itinerario al colegio. Este proyecto puede ser útil también para personas mayores y personas con discapacidad cognitiva o enfermedad mental.
• El audífono conectado Oticon Opn. Mediante conectividad Wifi y recetas basadas en IFTTT (IF This Then That) permite a las personas sordas configurarlo para recibir diferentes alertas como puede ser un timbre, o la activación de un detector de humo.
En definitiva, podemos ver cómo el camino hacia esa interconexión para “cualquier persona”, puede estar más cerca gracias a los avances del IoT.
Nikola Tesla, visionario ingeniero y físico del siglo XIX, dedicó gran parte de su vida a la transmisión inalámbrica de energía del mismo modo que se hacía con la radio. Fue probablemente el primero que imaginó un mundo conectado describiéndolo con estas palabras: “Cualquier persona, en mar o en tierra, con un aparato sencillo y barato que cabe en un bolsillo, podría recibir noticias de cualquier parte del mundo o mensajes particulares destinados solo al portador; la Tierra se asemejaría a un inconmensurable cerebro, capaz de emitir una respuesta desde cualquier punto”.
¿No es el ahora llamado Internet de las Cosas (IoT) un gran paso hacia ese “inconmensurable cerebro”? Para aquellos que nos dedicamos a las nuevas tecnologías, ¿no debería la expresión “cualquier persona”, motivarnos a no excluir a nadie del mundo conectado, ya sea por razones económicas, sociales o de diversidad funcional?
“Internet de las Cosas” es una expresión que hoy cuenta con infinidad de descripciones, pero podemos concretar que es un término inventado en 1999 por Kevin Asthon, co-fundador del MIT y creador de un sistema estándar global para RFID y otros sensores. Utilizó el término IoT para describir un “sistema donde Internet está conectado con el mundo físico a través de sensores ubicuos”.
Una de las descripciones más formales encontradas pertenece al Cluster of European Research Projects (IERC, 2009) que lo define como “una infraestructura de red global y dinámica con capacidad de auto configuración basada en protocolos de comunicación estandarizados e interoperables donde las cosas (things) físicas y virtuales tienen identidades, atributos físicos, personalidad virtual, y haciendo uso de interfaces inteligentes se integran perfectamente en la red de información”.
Más recientemente, Diego Soriano (CENTAC) ponía palabras un poco más amables y accesibles el concepto de IoT: «De forma resumida, IoT es la tecnología que permite emplear de forma conjunta, sencilla y barata gran cantidad de elementos electrónicos conectados a Internet».
Si unimos estas ideas con los siguientes aspectos tecnológicos: • la gran cantidad de sensores y wearables disponibles y en fases de diseño • el uso de tecnologías como Big Data y Cloud para analizar, gestionar y almacenar los datos generados por estos dispositivos
Internet de las Cosas nos proporciona elementos suficientes para crear productos y sistemas capaces de facilitarnos la vida al poder interactuar con el mundo que nos rodea sin tener que estar conectados a él a través de cables (avisos en nuestro smartphone, tablet o pulseras desde los dispositivos que nos rodean, posibilidad de interactuar con los electrodomésticos y elementos de seguridad de nuestra casa desde una ubicación diferente). Como veremos en próximos posts, ese “facilitarnos la vida” del IoT puede resultar especialmente útil y significativo para personas con discapacidad y suponer un avance en su independencia.
Por una parte, tenemos aquellos productos de carácter general que abren campos de aplicación a diferentes colectivos y, por otro, soluciones creadas específicamente para personas con alguna discapacidad y que, en la línea de la reflexión que siempre hacemos, evolucionarán facilitando la vida al público en general.
La semana que viene seguiremos analizando los diferentes escenarios de aplicación del IoT al mundo de la discapacidad. Además de todo lo relacionado con el “hogar conectado”, veremos algunos ejemplos concretos de aplicación que ya están en el mercado.
Estamos acostumbrados a ver cómo las nuevas tecnologíasayudan a las personas que tienen alguna discapacidad física: sillas de ruedas automáticas, prótesis revolucionarias, incluso sensores de imagen o voz directamente conectados al cerebro por medio de electrodos. Pero ¿qué hay de las personas con alguna discapacidad psíquica? Pensemos en quienes sufren esquizofrenia. Es esta una condición crónica caracterizada por ciertas conductas que resultan anómalas para la comunidad. En particular, muchas personas con esquizofrenia tienen dificultad para reconocer las emociones en las expresiones faciales de otras personas, lo cual afecta gravemente a su comportamiento social. Además, esta dificultad no es exclusiva de la esquizofrenia, sino que se observa también en casos de manía, demencia, daño cerebral, autismo etc.
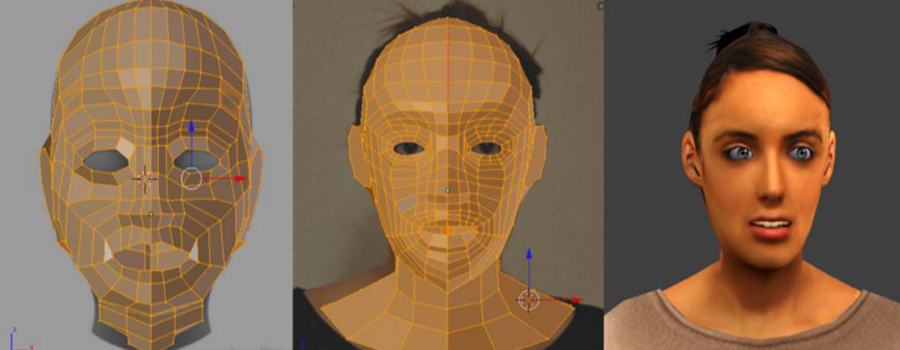
Aquí entran en juego las tecnologías de robótica social. Un robot social es aquel que interactúa y se comunica con las personas (o con otros robots) siguiendo una serie de comportamientos y reglas sociales. Además, tradicionalmente se considera que un robot debe estar materializado en forma de dispositivo físico. Pero las mismas habilidades de interacción diseñadas para un robot físico pueden integrarse en un personaje virtual representado en un ordenador. Desde esta perspectiva, un avatar puede ser considerado un robot, en línea con el nuevo paradigma tecnológico en el que la frontera entre lo físico y lo virtual se diluye progresivamente.
Ahora bien, ¿qué ventajas tiene el uso de avatares en terapias psicológicas y psiquiátricas? En mi opinión, innumerables. Un avatar puede alcanzar un nivel de expresividad comparable (si no superior) al de un robot físico, e incluso al de una personal real. Ni siquiera se necesita una apariencia humana hiperrealista: un simple dibujo animado puede resultar enormemente expresivo (pensemos en el Coyote cuando en su persecución del Correcaminos, sobrepasa el límite del acantilado). A diferencia de una persona real, la expresividad de avatar puede ser controlada al milímetro por un terapeuta. Este puede hacer que el avatar virtual muestre emociones en distinto grado, desde incipientes hasta muy marcadas, aleatoriamente o en progresión, incluso en función del comportamiento del usuario.
Otro gran aspecto involucrado es la sensorización. Aquí juega un papel determinante la tecnología de Visión Artificial. Estamos acostumbrados a las cámaras de nuestros móviles que detectan y siguen caras, identifican cuáles corresponden a personas de nuestro entorno familiar o social y determinan cuándo abren los ojos y sonríen. Obviamente, esta tecnología puede ponerse al servicio de percibir la actitud del usuario durante una interacción: si sonríe o está triste, si se muestra tranquilo o nervioso, si se siente angustiado. El análisis de voz puede complementar esta información. Las propias palabras empleadas por la persona dicen mucho de su estado de ánimo. Pero, además, el tono y el ritmo también aportan información crucial: una persona irritada habla rápido y a volumen alto, mientras que alguien que está aburrido habla despacio, como arrastrando las palabras. Bien es verdad que hoy por hoy, el análisis de la voz va un paso por detrás del análisis de imágenes, probablemente porque está muy unido a la inteligencia artificial, que aún representan un reto (es verdad, cada vez más al alcance de la tecnología).
¿A dónde llegamos con todo esto? A un avatar virtual (o físico) que sigue el rostro del usuario con la mirada, interpreta sus emociones y reacciona de forma acorde a ellas, conversa con él y puede ser supervisado por un terapeuta, con la ventaja de estar disponible las 24 horas del día. Un compañero, en definitiva, que sirve de entrenador personal de cara a mejorar la percepción de las emociones humanas. No es el futuro. Es el presente.
El incremento de la esperanza de vida, unido al descenso de la tasa de natalidad, tiene como consecuencia una población cada vez más envejecida. Según las proyecciones realizadas por el Instituto Nacional de Estadística, en el año 2050 el 30% de la población tendrá una edad superior a 65 años y, de éstos, un tercio serán octogenarios.
Esta gran cantidad de población va a presentar necesidades de asistencia que difícilmente van a poder ser cubiertas por la población activa. La robótica asistencial se perfila como una solución que puede ayudar a paliar en parte este problema. La robótica asistencial es el área de la robótica de servicios en la que el robot interactúa directamente con el individuo. El campo de aplicación es muy amplio. Se pueden diseñar robots de ayuda a la movilidad de la persona (levantarse, caminar, etc.), ayuda a la rehabilitación física y/o cognitiva, robots que ayuden a la realización de tareas cotidianas, o que ofrezcan compañía, cuidado y entretenimiento. Desafortunadamente, las expectativas que se han generado sobre este tipo de robots han sido muy altas, en parte por los robots de las películas Walle, R2D2, C3PO, Cortocircuito, etc, que tienen capacidades similares a las de los humanos. Sin embargo, son pocos los robots que se han introducido en el mercado si exceptuamos robots aspiradores, cortacésped y limpiadores de piscinas. El éxito de estos robots se debe sin duda a que desarrollan actividades muy concretas a un costo razonable.
La principal dificultad de los robots asistenciales es que deben interaccionar con las personas, para lo que deben tener sistemas perceptivos robustos, capacidad de movimiento, manipulación, cognición y sistemas de interacción orientados a comunicarse con los humanos mediante lenguaje natural y gestual.
El estado de la tecnología actual no permite desarrollar robots con estas capacidades tan avanzadas, por lo que la solución pasa por desarrollar robots con capacidades restringidas a contextos definidos, acotando su funcionalidad pero procurando una correcta integración de todos los subsistemas que permita superar las situaciones previstas. Por ejemplo, la solución de un problema complejo secuencial, como un diálogo verbal continuado con el robot, puede acotarse a contextos definidos según el tema o estado de la conversación. Esta agrupación contextual puede aplicarse a otros aspectos como el reconocimiento visual o el control emocional.
También es importante que desde las primeras etapas se realice la experimentación y desarrollo en el entorno real donde va a operar el robot. Frecuentemente, se focalizan todos los esfuerzos en desarrollos en el laboratorio alejados de los usuarios y del servicio final que debe realizar el robot.
Una buena metodología es un desarrollo iterativo y de refinamientos sucesivos del robot en el que cada vez se vayan incorporando nuevas funcionalidades, capacidades y métricas que permitan una evolución del robot teniendo en cuenta al usuario en su desarrollo.
Sin embargo, no solo existen barreras científico-técnicas que impiden que los robots asistenciales lleguen al mercado. Existen también barreras de tipo social que es necesario superar. Frecuentemente, hay serias reticencias a ser aceptados por las personas por su apariencia, miedo a la tecnología o que los ven como una amenaza que puede quitar puestos de trabajo. Todo esto justifica aún más la necesidad de contar con los propios usuarios desde las primeras fases de diseño de los robots.
En CARTIF llevamos varios años desarrollando robots de servicio con una metodología de diseño basada en las necesidades del usuario. Nuestro último reto es que Sacarino, un robot con capacidad social y de interacción, preste labores de terapia, asistencia y entretenimiento en una de las unidades de convivencia del Centro Hospitalario San Luis en Palencia. Esperemos que podamos contribuir al desarrollo de robots asistenciales y que en unos años la robótica asistencial sea una realidad que aporte servicios de valor añadido y esté presente en nuestros hogares y hospitales.