In the new era of Industry 5.0, robots are no longer just tools for automation, they are becoming active collaborators for people. The key is no longer only about producing faster, but about building flexible, personalized, and human-centric environments. And here comes a fundamental challenge: how can we enable robots to understand and communicate with us naturally?
The answer lies in Human-Robot Interaction (HRI), a field that seeks to make machines perceive, interpret, and respond to people in an appropriate way. Yet, one of the biggest obstacles is the lack of a universal language that allows different systems and sensors to work together seamlessly
This is where ROS4HRI comes in: an open standard driven by our partner in the ARISE project, PAL Robotics. Within this ecosystem, PAL contributes its expertise in humanoid and social robotics, ensuring that ROS4HRI is validated in real environments from testing labs to productive scenarios such as hospitals and healthcare centers.
Standard ROS4HRI
What is ROS4HRI?
ROS4HRI is an extension of ROS2 (Robot Operating System) that defines a set of standardized interfaces, messages, and APIs designed for human-robot interaction.
Its goal is simple: to create a common language that unifies how robots perceive and interpret human signals, regardless of the sensors or algorithms used. With ROS4HRI, robots can manage key information such as:
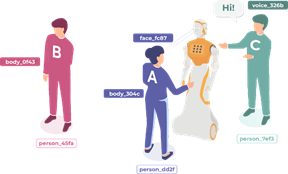
Person identity: recognition and individual tracking.
Social attributes: emotions, facial expressions, even estimated age.
Non-verbal interactions: gestures, gaze, body posture.
Multimodal signals:voice, intentions, and natural language commands
ROS4HRI Architecture
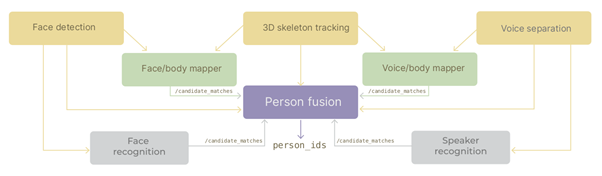
The design of ROS4HRI follows a modular approach, breaking down barriers between different perception systems. This ensures robots can process human information in a coherent and consistent way, fully aligned with the open philosophy of ROS2. Its main components include:
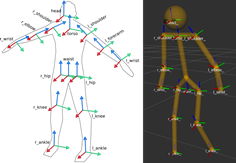
Standard messages: to represent human identities, faces, skeletons, and expressions.
Interaction APIs: giving applications uniform access to this data.
Multimodal integration: combining voice, vision, and gestures for richer interpretation.
Compatibility with ROS2 and Vulcanexus: enabling deployment in distributed, mission-critical environments.
You can see part of its core modules in the figure below. For more details, the code and documentation are available in the official repository: github.com/ros4hri
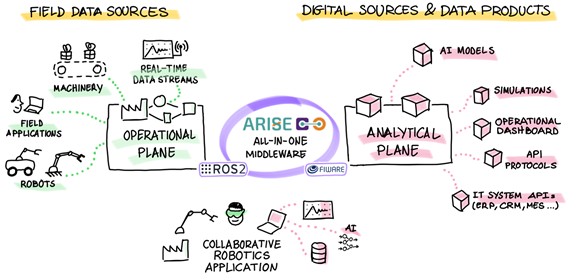
In the European project ARISE, ROS4HRI plays a key role within the ARISE middleware, integrating with ROS2, Vulcanexus, and FIWARE.
This powerful combination enables Industry 5.0 scenarios where robots equipped with ROS4HRI can:
Recognize an operator and adapt their behavior based on role or gestures.
Interpret social signals such as signs of fatigue or stress, to provide more human-aware support.
Share information in real time with industrial management platforms, e.g. through FIWARE enriching decision-making.
What makes it even more interesting is that ROS4HRI does not operate in isolation: it leverages resources already available within the community. A great example is MediaPipe, Google’s widely used library for gesture, pose, and face recognition. With ROS4HRI, MediaPipe outputs (like 2D/3D skeletons or hand detection) can be seamlessly integrated into ROS2 in a standardized way.
A practical example
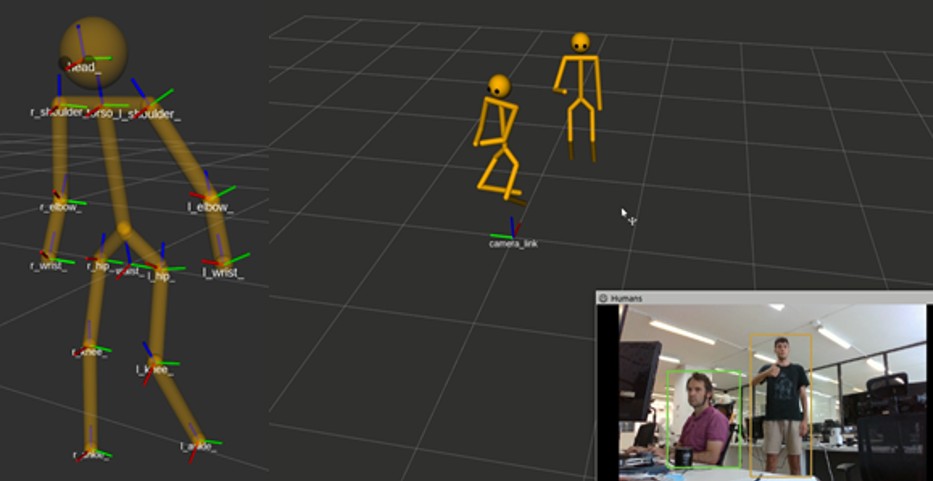
A practical example within ARISE using ROS4HRI is a module for detecting finger movements. A package was developed in ROS2 that follows the ROS4HRI standard and uses Google’s MediaPipe library to process video from a camera. The main node extracts the 3D coordinates of hand joints and publishes them in a ROS topic following ROS4HRI conventions, such as: /humans/hands/<id>/joint_states.
Thanks to this standardized format, other system components (for instance, an RViz visualizer or a robot controller) can consume this data interoperably, enabling applications like gesture-based robot control.
The evolution towards Industry 5.0 demands robots that can interact in ways that are more human, reliable, and efficient.On this path, ROS4HRI is emerging as a key standard to enable seamless human-robot collaboration ensuring interoperability, scalability, and trust. Its applications extend beyond industry, reaching into healthcare, education, and services, where the ability to understand and respond to people is essential.
References
Lemaignan, S.; Ferrini, L.; Gebelli, F.; Ros, R.; Juricic, L.; Cooper, S. Hands-on: From Zero to an Interactive Social Robot using ROS4HRI and LLMs. HRI 2025. https://ieeexplore.ieee.org/document/10974214
Ros, R.; Lemaignan, S.; Ferrini, L.; Andriella, A.; Irisarri, A. ROS4HRI: Standardising an Interface for Human-Robot Interaction.2023PDF link
In the world of software development, interoperability is the ability of different devices, systems, and applications to work together in a coordinated manner, much like musicians in the Vienna Symphony Orchestra, regardless of their origin or technology. This concept is essential in digital transformation, where systems, such as a robotic application, must integrate with multiple platforms, including robotic control systems, artificial intelligence solutions, and industrial IT management platforms like ERP (Enterprise Resource Planning) or MES (Manufacturing Execution System).
The primary goal is to facilitate real-time data exchange for smarter decision-making. Interoperability plays a crucial role in robotics by enabling seamless integration between heterogeneous industrial production systems and digital platforms.
Benefits of interoperability
Adopting interoperability technologies in robotic application development brings multiple advantages, including:
Intelligent asset management and remote monitoring of robots and machine tools, allowing centralized, real-time control of distributed systems.
Optimized decision-making: With real-time data availability, organizations can enhance their responsiveness to unexpected events and optimize workflows.
Scalability and modularity: Enabling the integration of new technologies, sensors, and robots without the need for complete system redesigns, supporting adaptability to future industrial needs.
Cost and downtime reduction in production lines through the integration of heterogeneous systems, minimizing setup times and allowing quick reconfiguration and process flexibility in dynamic environments.
Predictive maintenance and resource optimization: Using AI-based models to anticipate failures, optimize spare part usage, and extend equipment lifespan without compromising productivity.
FIWARE as an interoperability enabler
For robotic systems to integrate efficiently, they must be compatible with standardized platforms that enable intelligent data management and communication. FIWARE, which we work with in the ARISE project, is a set of technologies, architectures, and standards that accelerate the development and deployment of open-source solutions. As a leading technology in the European Union, FIWARE primarily contributes to the creation of interoperable tools and services for real-time data management and analysis, ensuring persistence, flexibility, and scalability, thereby enabling the development of customized applications without excessive costs.
Another key value proposition is its multi-sector nature. FIWARE’s standardized reference components and architectures allow any solution designed for a specific sector—such as manufacturing, logistics, or services—to be inherently interoperable with other verticals, including energy management, mobility, or emerging data spaces.
In ARISE, we develop robotic applications for human-robot interaction by integrating our ARISE middleware (a middleware solution that incorporates Vulcanexus, ROS2, FIWARE, and ROS4HRI) into four experimental environments. These environments explore connected robotic solutions with FIWARE in an Industry 5.0 scenario. One of these environments is in CARTIF, a laboratory for testing and validating technology in controlled environments (TRL 4-5). Figure 1 below shows this experimental setup:
Fig 1. CARTIF testing environment
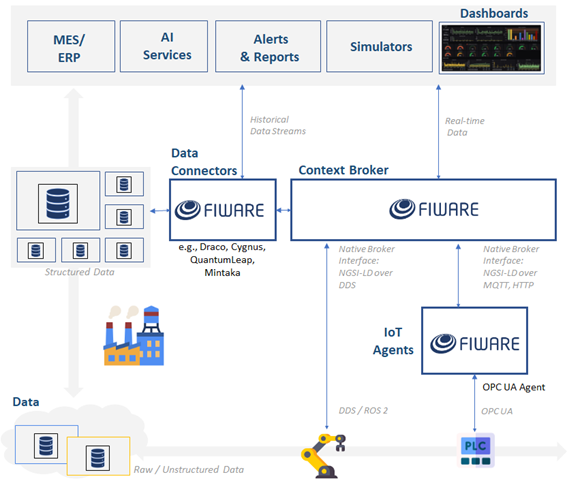
FIWARE plays a fundamental role in providing tools that enable interoperability between heterogeneous systems, ensuring seamless integration of real-time data and IoT devices, as well as dynamic data management from the operational level, allowing communication between different systems, devices, and platforms toward the analytical level. This ensures deep integration with enterprise IT/OT infrastructures (see Figure 2):
Fig 2. ARISE middleware ecosystem
Designing a FIWARE architecture and key components
The design of a FIWARE architecture follows a modular approach, where components are integrated according to application needs. The architecture is built around its core component, the Context Broker, which manages real-time data flows. To implement FIWARE effectively, it is recommended to follow these steps:
Define the use case: identify the application’s objectives and requirements.
Select the appropriate architecture: include the Context Broker, IoT Agents, and other components as needed, converting heterogeneous protocols into FIWARE-compatible data. For example, the OPC-UA IoT Agent enables real-time management of data collected in industrial environments, facilitating interoperability with other systems.
Integrate devices and systems: connect sensors, robots, or other systems via OPC-UA, MQTT, or other protocols.
Implement security and access control: use Keyrock and PEP Proxy to ensure data protection, authentication, and access control.
Store and analyze data: utilize Cygnus, Draco, or QuantumLeap for valuable insights, historical data storage, persistence, and Big Data analysis.
Deploy in the cloud or local environments: consider FIWARE Lab or private infrastructure for hosting services.
Monitoring and optimization: evaluate system performance and improve integration with platforms like AI-on-Demand or Digital Robotics. Wirecloud enables the creation of custom visual dashboards, facilitating easy integration with applications like Grafana and Apache Superset.
Fig 3. FIWARE architecture modules and application example
At CARTIF, we continue to invest in these technologies to build a future where system and platform collaboration is the key to success. Recently, we joined the FIWARE iHubs network under the name CARTIFactory. As an official iHub, it will not only promote FIWARE adoption but also serve as a reference center with its experimentation lab, fostering interoperability in robotic applications within our community and industrial ecosystem.
Interoperability is not just a technical requirement but a fundamental pillar for the success of digital transformation in industry. Technologies like FIWARE enable the connection of systems, process optimization, and the development of a flexible and scalable ecosystem. Thanks to this capability, companies can integrate artificial intelligence, robotics, and advanced automation seamlessly.
Co-authors
Aníbal Reñones. Head of the Industry 4.0 Area, Industrial and Digital Systems Division
Francisco Meléndez. Robotics Expert and FIWARE Evangelist, Technical Coordinator of the ARISE Project (FIWARE Foundation)
In a world where humans perform tasks that involve manipulating objects, such as lifting, dragging or interacting with them (for example, when we use our beloved mobile phones or we eat an apple), these actions are performed subconsciously, naturally. It is our senses that allow us to adapt our physical characteristics to the tasks instinctively. In contrast, robots act like little human apprentices, imitating our behaviour, as they currently lack the same awareness and intelligence.
To address this gap, Human Robot Interaction (HRI) emerged, a discipline that seeks to understand, design and evaluate the interaction between robots and humans. This field had its beginnings in the 1990s with a multidisciplinary approach but today its study is in constantly evolving and has given rise to important events1 that bring together visionaries in the field, who seek to promote this technology, bringing us ever closer to a world where artifical intelligence and humans understand each other and collaborate,transforming our near future.
Understanding the discipline of human-robot interaction is crucial. It is not a simple task; rather, it is tremendously challenging, requiring contributions from cognitive science, linguistics, psychology, engineering, mathematics, computer science, and human factors design. As a result, multiple attributes are involved:
Level of autonomy: decision making indepently
Exchange of information: fluency and understanding between different parts.
Different technologies and equipment: major adaptation between languages and models.
Tasks configuration: definition and execution of tasks efficiently.
Cognitive learning: abilities to learn and improve with time.
Here again, the type of interaction, is of particular importance, which is defined as a reciprocal action, relationship or influence between two or more persons, objects, agents, etc. and a key factor is the distance between human and robot, where it can be called a distance interaction, e.g. mobile robots that are sent into space, or a physical interaction, where the human being has contact with the robot.
Human-robot interaction levels according to standards defined in ISO8373//10218//15066 Source: V. Villani, et al., Survey on human–robot collaboration in industrial settings: Safety, intuitive interfaces and applications, Mechatronics 55 (2018) 248–266,http://dx.doi.org/10.1016/j.mechatronics.2018.02.009
These attributes are just a sample of the complexities involved in these robotic interaction systems, where interdisciplinary collaboration is essential for their evolution.
The challenges of interaction between humans and robots
At the moment the challenges are related to the highly unstructured nature of the scenarios where collaborative robots are used, as it is impossible for a technology developer to structure the entire system environment. Among the most important challenges aspects related to mobility, communications, map constructions and situational awareness.
So, what is the next step in human-robot interaction? Challenges include getting them to speak the same language and improving and simplifying communication, especially for non-technologically trained people, not presupposing these prior skills and not needing complicated instruction manuals; also discovering new forms of interaction, through natural language, in the case of assistive robots, special care for proximity and vulnerability; in general improving interfaces, making them more agile and flexible, so that they can be easily adapted to different scenarios and changes in the environment.
On the other hand, a challenge that has become particularly important in recent times, is to take into account emotional needs, human values and ethics in human-robot interactions, as highlighted in this HRI definition above:
HRI definition (Human-Robot interaction)
is the science that studies people’s behaviour and attitudes towards robots in relation to their physical, technological and interactive characteristics, with the aim of developing robots that facilitate the emergence of efficient human-robot interactions (in accordance with the original requirements of their intended area of use), but are also acceptable to people and satisfy the social and emotional needs of their individual users, while respecting human values (Dautenhahn, 2013).
Inspired by this exciting field of work, CARTIF, in collaboration with FIWARE Foundationand other leading partners in Europe, will start in 2024 the EuropeanARISEproject, which aims to achieve real-time, agile, human-centric, open source technologies that drive solutions in Human-Robot HRI interaction by combining open technologies such as ROS 2, Vulcanexus and FIWARE. And where the aims is to solve challenges by funding experiments that develop agile HRI solutions with increasingly adaptive and intuitive interfaces.
ARISE will address many of the following challenges: (1) Application of collaborative robotics for disassembly of value-added products, (2) Picking of complex products in industrial warehouses, (3) Flexible robotic collaboration for more efficient assembly and quality control, (4) Intelligent reprogramming ensuring adaptability for different products through intuitive interfaces, (5) Search and transport tasks in healthcare environments, (6) Improving multimodal interaction around different functional tasks, (7) Robotic assistance in flexible high-precision tasks, and (8) Improving ergonomics and worker efficiency, thus generating a multidisciplinary framework that takes into account both technological and social aspects.
In addition, the ARISE project opens its doors to robotics experts so that they can collaborate in solving the various challenges, thus generating new technological components for the HRI Toolbox, such as ROS4HRI. This collaborative grand challenge aims to make it easier for companies to create agile and sustainable HRI aplications in the near future.
1ACM/IEEE International Conference on Human-Robot Interaction, IEEE International Conference on Robotics and Automation (ICRA) y Robotics Systems and sciences
Elicitation (from the latin elicitus “induced” and elicere “to catch”) is a term associated with psychology that refers to the fluid transfer of information from one human being to another by means of language.
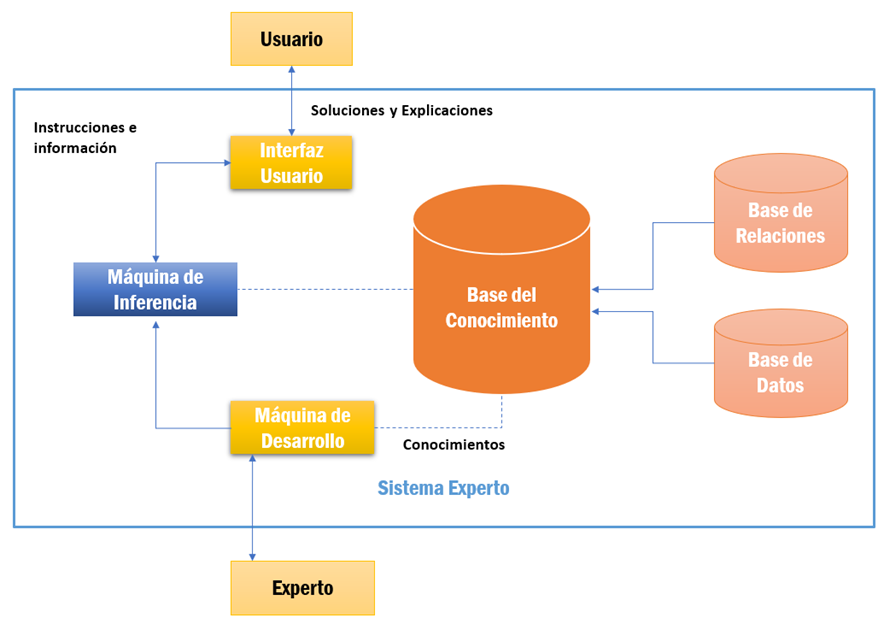
The knowledge elicitation applied to industry is a process by which valuable information and knowledge is collected and recorded from experts or people with experience in a particular area in the organization. Is a technique used to identify, extract and document the tacit knowledge (implicit) that is in the mind of the individuals or in the organizational processes. It is a way to collect and record the existing knowledge not available in formal documentation and is used in different fields such as knowledge- management, engineering, business, among others. The knowledge elicitation could be use inside the engineering field to optimize industrial processes, create expert systems, for apps based in AI, etc.
For example, if it were technologically possible to access the minds of workers as in the fictional series Severance, where a sinister biotech corporation, Lumon Industries, uses a medical procedure to separate work and non-work memories, this knowledge could be recorded and available for use, but it is also clear that this premise would raise significant ethical and legal concerns at this point in history, we do not know in the near future.
The knowledge elicitation is important for different reasons. In first place, allows organizations to document the existent knowledge of their employees and experts in an specific area.This can help to avoid re-invention of the wheel and improve efficiency in decision-making. Secondly, knowledge elicitation can also help to identify gaps in an organisation’s knowledge, enabling them to take action in advance. Thirdly, this elicitation process can help foster collaboration and knowledge sharing among an organisation’s employees.
The aim of elicitation is to obtain accurate and relevant information to aid decision-making, improve efficiency and support training and development. This information is used to develop optimal rules for expert performance that serve as the main input for the controls that can be programmed into a production process.
Knowledge elicitation is important for several reasons. Firstly (1), it allows organisations to document the existing knowledge of experts in a specific area. This can help to avoid re-invention of the wheel and improve efficiency in decision-making. Secondly (2), knowledge elicitation can also help to identify gaps in an organisation’s knowledge, allowing organisations to take action in advance. Thirdly (3), this elicitation process can help foster collaboration and knowledge sharing among an organisation’s employees.
The methodology for knowledge elicitation requires a series of steps to be followed:
Requirements analysis: identifying the approach to knowledge-based systems.
Conceptual modelling: creating a base of terminology used, defining interrelationships and constraints.
Construction of a knowledge base: rules, facts, cases or constraints.
Operation and validation: Operating using automated reasoning mechanisms.
Return to requirements analysis if necessary or continue with the process.
Enhancement and maintenance: Expanding knowledge as the system evolves, repeat throughout the life of the system.
Subsequently, it is necessary to analyse the knowledge collected, to determine which information is relevant and which is not, by distinguishing and separating the parts of a whole until its principles or elements are known, the result of which is high quality knowledge. The verification or detection of defects of the requirements previously analysed, normally by means of techniques such as formal reviews, checklists, etc.
The following elements are necessary for the correct development of the tendering process:
Experts
The different experts on the procces can have different point of views of a same theme, due to their experience, knowledge and even more subjective aspects such as mentality, way of focus difficulties, challenges, etc. Should be considered experts specialists in different stages, different infrastructures, equipment, products,etc.
The barriers that can appear in this type of exchange of information is that often contain complex ideas and associations, hard to comunicate in an easy way, with detail and organization, the use of a same language, such as concepts or specific vocabulary.
The knowledge elicitation has an objective search, research and help users or experts in the productive process in this case, to document their own needs by an on-site or online interview, group meetings, in situ studies, etc.
Interviews
To acquire expert knowledge the best technique is carrying out a number of personal interviews, some of the disadvantages are; distance, time and people involved on this process, the paper or online questionnaires can be viable option that saves time and costs and it is made easier for all sections to be present, enabling the comparative and evaluation of the results.
The characteristics for a good questionnaire design: define the relevant information, good structuring with different sections organized by themes, organizes points from general to more detailed in each section, focusing on the idea of those section,it is avoid the introduction of tendencies, misunderstandings or mistakes, to realize the design with an expert of the domain to ensure that points are enough understandable to facilitate the answer.
Results
The expected results are the actions to make by the operators when parameters deviations are produced, those answers and information collected are transform intop optimal needed rules to program authomatic controls about the process, and whre this rules are the main element. The obtention of rules is not an easy task, an iterative and heuristic process in several phases is recommended. For the validation it is necessary the comparative of the collected information at the databases with the answers of the operator to verify the actions when parameters deviations of the desired values are produced.
This optimal rules or also denominated if-then rules are part of the knowledge base, in particular of the relations base, that is the part of an expert system that contains the knowledge about the domain. In first place, the knowledge of the expert is obtained and it is codified in the relations base.
Finally, it is when fuzzy logic can be used for the design and implementation of an expert system, which is the logic that uses expressions that are neither totally true nor false, allowing to deal with imprecise information such as average height or low temperature, in terms of so-called “fuzzy” sets that are combined in rules to define actions: e.g. “if the temperature is high then cool down a lot”. This type of logic is necessary if one wants to better approximate the way of thinking of an expert, whose reasoning is not based on true and false values typical of classical logic, but requires extensive handling of ambiguities and uncertainties typical of human psychology.
Currently in CARTIF the expert elicitation knowledge of the plant operators are been used at the INTELIFER project, which main objective is the optimization of the process and of the products of a manufacturing line of NPK granulated fertilisers with support of the artificial intelligence.
The operation of these type of granulated fertilisers plants is controlled manualli and heuristically by expert operators, but that, despite of its skills and habilities, they can not avoid the high rates of recycle, frequent inestabilities and non-desired stops, as well as the limite quality of the products. Due to the extremely complex nature of the granulated process, which includes multistages, multiproduct, multivariables, is not lineal, coupled, stochastic. So that the situation before exposed has meant the scientific base for the defiition of the present project, being necessary the development of R&D activities in which, by the application of the artificial intelligence philosophy joint with a higher degree of sensorization and digitalization, is achieved to optimize this type of manufacturing processes.