En la nueva era de la Industria 5.0, los robots dejan de ser simples herramientas de automatización para convertirse en colaboradores activos de las personas. La clave ya no está solo en producir más rápido, sino en lograr entornos productivos flexibles, personalizados y centrados en el ser humano. Y aquí aparece un reto fundamental: ¿cómo conseguimos que los robots entiendan y se comuniquen con nosotros de forma natural?
La respuesta está en la interacción humano-robot (HRI, por sus siglas en inglés). Se busca que las máquinas puedan percibirnos, interpretarnos y responder de manera adecuada. Sin embargo, uno de los grandes obstáculos es la falta de un lenguaje común que permita a distintos sistemas y sensores trabajar juntos de forma armonizada.
En este contexto surge ROS4HRI, un estándar abierto impulsado por nuestro partner en ARISE, PAL Robotics. En este ecosistema, nuestro partner aporta su experiencia en robótica humanoide y social, asegurando que la validación de ROS4HRI se realice en entornos reales, desde laboratorios de pruebas hasta escenarios productivos reales como hospitales y centros de atención sanitaria.
Standard ROS4HRI
¿Qué es ROS4HRI?
ROS4HRI es una extensión de ROS2 (Robot Operating System) que define un conjunto de interfaces, mensajes y APIs estandarizadas orientadas a la interacción humano-robot.
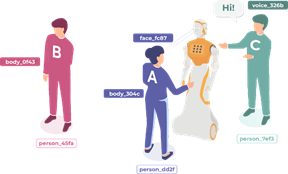
Su propósito es claro: crear un lenguaje común que unifique la forma en la que los robots perciben e interpretan las señales humanas, sin importar qué sensores o algoritmos están detrás. Los robots pueden gestionar información clave como:
Identidad de la persona: reconocimiento y seguimiento individual.
Atributos sociales: emociones, expresiones faciales e incluso edad estimada.
Interacciones no verbales: gestos, mirada, postura corporal.
Señales multimodales: voz, intenciones y comandos en lenguaje natural.
Arquitectura de ROS4HRI
El diseño de ROS4HRI sigue un enfoque modular, derribando las barreras entre distintos sistemas de percepción, asegurando que los robots puedan procesar información humana de manera coherente, independientemente de los sensores o algoritmos que se utilicen, siempre en línea con la filosofía abierta de ROS2. Sus componentes principales son:
APIs de interacción: facilitan que las aplicaciones accedan a esta información de manera uniforme.
Integración multimodal: combina datos de voz, visión y gestos para enriquecer la interpretación.
Compatibilidad con ROS2 y Vulcanexus, que asegura su despliegue en entornos distribuidos.
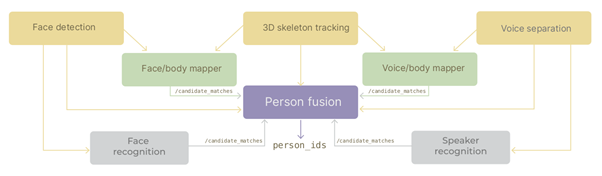
En la siguiente figura puede verse parte de su núcleo y los distintos módulos que lo conforman. Para quien quiera profundizar, el código y la documentación están disponibles en el repositorio oficial: github.com/ros4hri
En el proyecto europeo ARISE, ROS4HRI juega un papel clave dentro del ARISE middleware, integrándose con ROS2, Vulcanexus y FIWARE.
Esta combinación permite explorar escenarios de industria 5.0 en los que robots equipados con ROS4HRI pueden:
Reconocer a un operario y adaptar su comportamiento en función de su rol o gestos.
Interpretar señales sociales como expresiones de cansancio o estrés para ofrecer un apoyo más humano.
Compartir información en tiempo real con plataformas de gestión industrial p.e a través de FIWARE, enriqueciendo así la toma de decisiones.
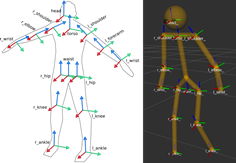
Lo interesante es que ROS4HRI no funciona de manera aislada, sino que se apoya en recursos ya existentes dentro de la comunidad. Un buen ejemplo es MediaPipe, la librería de Google muy utilizada para el reconocimiento de gestos, poses y rasgos faciales. Gracias a ROS4HRI, los resultados obtenidos con MediaPipe (como esqueletos 2D/3D o detección de manos) pueden integrarse de manera estándar dentro de ROS2.
Ejemplo práctico
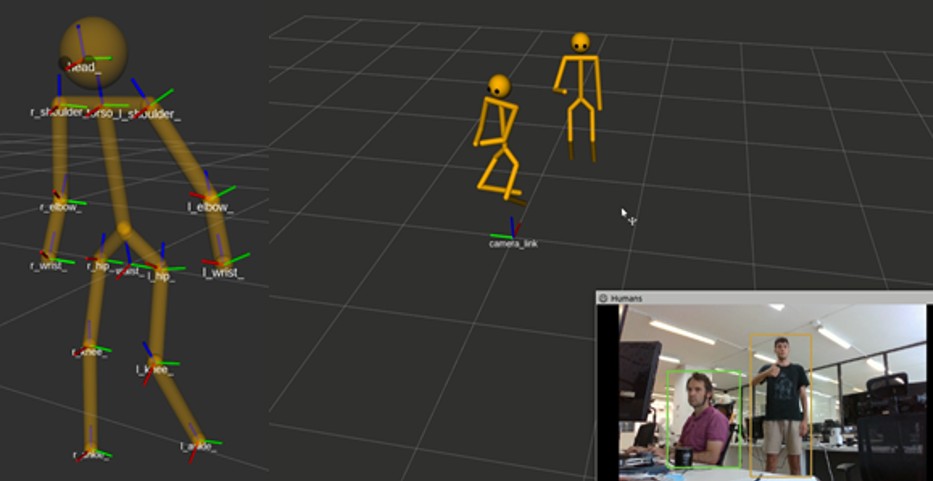
Un ejemplo práctico en ARISE usando ROS4HRI es la creación de un módulo para detectar los movimientos de los dedos de la mano. Para ello, se desarrolló un paquete en ROS2 que sigue el estándar ROS4HRI y emplea la librería MediaPipe de Google para procesar el vídeo de una cámara.
En este caso el nodo principal extrae las coordenadas 3D de las articulaciones de la mano y las publica en un tópico de ROS siguiendo las convenciones de ROS4HRI, cómo /humans/hands/<id>/joint_states. Gracias a este formato estandarizado, otros componentes del sistema (por ejemplo, un visualizador en RViz o un controlador de robot) pueden usar esos datos de manera interoperable para tareas como control por gestos.
La evolución hacia la Industria 5.0 exige robots capaces de interactuar de forma más humana, confiable y eficiente. En este camino, ROS4HRI se consolida como un estándar clave para habilitar la colaboración humano-robot, garantizando interoperabilidad, escalabilidad y confianza, con aplicaciones que transformarán no sólo la industria, sino también la sanidad, la educación y los servicios.
Referencias
Lemaignan, S.; Ferrini, L.; Gebelli, F.; Ros, R.; Juricic, L.; Cooper, S. Hands-on: From Zero to an Interactive Social Robot using ROS4HRI and LLMs. HRI 2025. https://ieeexplore.ieee.org/document/10974214
Ros, R.; Lemaignan, S.; Ferrini, L.; Andriella, A.; Irisarri, A. ROS4HRI: Standardising an Interface for Human-Robot Interaction.2023PDF link
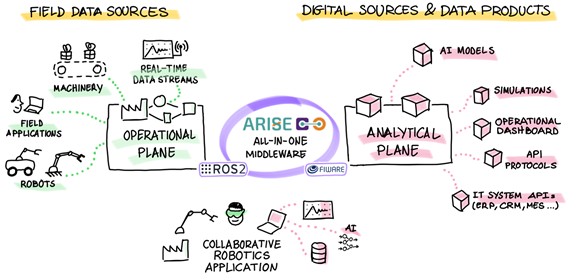
En el mundo del desarrollo de software, la interoperabilidad es la capacidad de que diferentes dispositivos, sistemas y aplicaciones trabajen juntos de manera coordinada, como si fueran músicos en la orquesta sinfónica de Viena, independientemente de su origen o tecnología. Este concepto es clave en la transformación digital donde los sistemas, como por ejemplo, una aplicación robótica, deben integrarse con múltiples plataformas, incluyendo sistemas de control robotizados, soluciones de inteligencia artificial y plataformas de gestión industrial IT como el ERP (Planificación de Recursos Empresariales) o MES (Sistema de Ejecución de Fabricación).
El objetivo principal es facilitar el intercambio de datos en tiempo real para una toma de decisiones más inteligente. La interoperabilidad desempeña un papel esencial en la robótica al permitir la integración fluida entre sistemas productivos industriales heterogéneos y plataformas digitales.
Beneficios de la interoperabilidad
Adoptar tecnologías de interoperabilidad en el desarrollo de aplicaciones robóticas aporta múltiples ventajas, entre ellas:
Gestión inteligente y monitorización remota de activos como robots y máquinas herramienta, permitiendo un control centralizado y en tiempo real de sistemas distribuidos.
Optimización de la toma de decisiones, gracias a la disponibilidad de datos en tiempo real, se asegura una mejor capacidad de respuesta a eventos imprevistos y optimización de flujos de trabajo.
Facilidad de escalabilidad y modularidad: permitiendo la integración de nuevas tecnologías, sensores y robots sin la necesidad de rediseñar sistemas completos, favoreciendo la adaptabilidad de futuras necesidades industriales.
Reducción de costes y tiempos de inactividaden líneas de producción, gracias a la integración de sistemas heterogéneos, minimizando tiempos de configuración y permitiendo una rápida reconfiguración y flexibilidad de procesos productivos en entornos dinámicos.
Mantenimiento predictivo y optimización de recursos, utilizando modelos basados en IA para anticipar fallos, optimizar el uso de repuestos y aumentar la vida útil de los equipos sin comprometer la productividad.
FIWARE como facilitador de la interoperabilidad
Para que los sistemas robóticos puedan integrarse de manera eficiente, es crucial que sean compatibles con plataformas estandarizadas que permitan la gestión inteligente de datos y la comunicación. FIWARE, con la que trabajamos en el proyecto ARISE, es un conjunto de tecnologías, arquitecturas, y estándares que aceleran el desarrollo e implantación de soluciones basadas en código abierto. Como tecnología referente para la Unión Europea, FIWARE contribuye principalmente a la creación de herramientas y servicios interoperables para la gestión y análisis de datos en tiempo real, asegurando persistencia, flexibilidad y escalabilidad, permitiendo así la creación de aplicaciones personalizadas sin costes excesivos. Otra propuesta de valor es su naturaleza multi-sector. Los componentes y arquitecturas de referencia estandarizados de FIWARE permiten que cualquier solución diseñada para un sector específico de la industria productiva, logística o servicios, sea por defecto interoperable con otro tipo de verticales como la gestión de energía, movilidad, o los emergentes espacios de datos.
En ARISE, desarrollamos aplicaciones robóticas para la interacción humano-robot integrando nuestro ARISE middleware (solución middleware que integra Vulcanexus, ROS2, FIWARE y ROS4HRI), en cuatro entornos de experimentación explorando soluciones robóticas conectadas con FIWARE en un escenario de industria 5.0. Uno de estos entornos está en CARTIF, un laboratorio para pruebas de validación tecnológica en entornos de prueba controlados (TRL 4-5). En la siguiente Figura 1 se puede ver este entorno de experimentación:
Fig 1. Entorno de experimentación en CARTIF
El papel fundamental de FIWARE radica en proporcionar herramientas que permitan la interoperabilidad entre sistemas heterogéneos, asegurando una integración fluida de datos y dispositivos IoT en tiempo real, una gestión dinámica de los datos procedentes del plano operacional permitiendo la comunicación entre diferentes sistemas, dispositivos y plataformas hacia el plano analítico, garantizando una integración profunda con las infraestructuras IT/OT empresariales (ver figura 2):
Fig 2. Ecosistema ARISE middleware
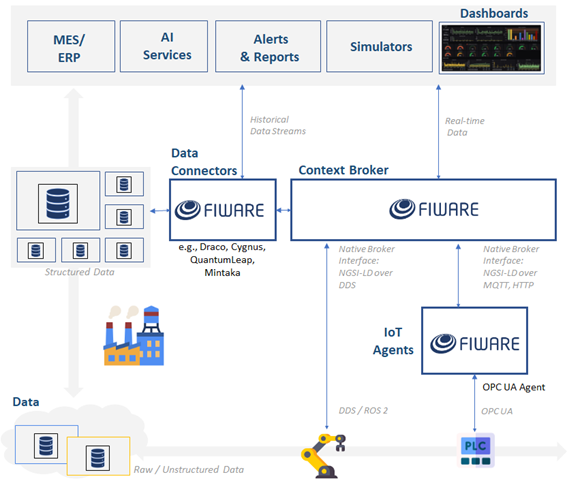
Cómo se diseña una arquitectura FIWARE y componentes clave
El diseño de una arquitectura FIWARE se basa en un enfoque modular, donde los componentes se integran según las necesidades de la aplicación. La arquitectura se organiza en torno a su núcleo central (Context Broker) que gestiona el tránsito de los datos en tiempo real. Para implementar FIWARE de manera efectiva, se recomienda seguir estos pasos:
Definir el caso de uso: identificar los objetivos y requisitos de la aplicación
Seleccionar la arquitectura adecuada: incluir el Context Broker, IoT Agents y otros componentes según las necesidades, convertir protocolos heterogéneos en datos compatibles con FIWARE. Por ejemplo, el habilitador OPC-UA IoT Agent, facilita que los datos recopilados en entornos industriales puedan gestionarse en tiempo real, facilitando la interoperabilidad con otros sistemas.
Integrar dispositivos y sistemas: conectar sensores, robots u otros sistemas mediante OPC-UA, MQTT u otros protocolos.
Implementar seguridad y control de acceso: usar Keyrock y PEP Proxy para garantizar la protección de datos gestiona la autenticación y control de acceso.
Almacenar y analizar datos: utilizar Cygnus, Draco o QuantumLeap para obtener información valiosa, para el almacenamiento histórico de datos, persistencia y su análisis en plataformas Big Data.
Desplegar en la nube o en entornos locales: considerar FIWARE Lab o infraestructura propia para el hosting de los servicios.
Monitorización y Optimización: evaluar el rendimiento del sistema y mejorar la integración con otras plataformas como AI-on-Demand o Digital Robotics. Wirecloud permite la creación de dashboards visuales personalizados. También facilita la conexión con otras aplicaciones de fácil integración como Grafana y Apache Superset.
Fig 3. FIWARE arquitectura modulas y ejemplo de aplicación
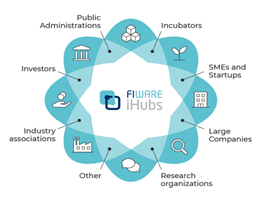
En CARTIF seguimos apostando por estas tecnologías para construir un futuro donde la colaboración entre sistemas y plataformas sea la clave del éxito. Recientemente nos hemos unido a la red de FIWARE iHubs con el nombre de CARTIFactory. Como iHub oficial, no solo fomentará la adopción de FIWARE, sino que también actuará como un centro de referencia con su laboratorio de experimentación para fomentar la interoperabilidad en aplicaciones robóticas de nuestra comunidad y ecosistema industrial.
En conclusión, la interoperabilidad no es solo un requisito técnico sino un pilar fundamental para el éxito de la transformación digital en la industria. Tecnologías como FIWARE permiten conectar sistemas, optimizar procesos y fomentar un ecosistema , flexible y escalable Gracias a esta capacidad, las empresas pueden integrar inteligencia artificial, robótica y automatización avanzada.
Co-autores
Aníbal Reñones. Director del área de Industria 4.0 de la División de Sistemas Industriales y Digitales.
Francisco Meléndez. Experto en Robótica y FIWARE Evangelista. Technical Coordinator en el proyecto ARISE (FIWARE Foundation).
En un mundo donde los seres humanos llevamos a cabo tareas que involucran la manipulación de objetos, como alzarlos, arrastrarlos o interactuar con ellos (por ejemplo, cuando usamos nuestros queridos móviles o nos comemos una manzana), estas acciones se ejecutan de manera inconsciente, de forma natural. Son nuestros sentidos los que nos permiten adaptar nuestras características físicas a las tareas de manera instintiva. En contraste, los robots actúan como pequeños aprendices de humanos, imitando nuestro comportamiento, ya que actualmente carecen de la misma consciencia e inteligencia.
Para abordar esta brecha, emergió la «Interacción Humano Robot» (HRI, por sus siglas en inglés), una disciplina que busca comprender, diseñar y evaluar la interacción entre robots y seres humanos. Este campo tuvo sus inicios en la década de los 90´s con un enfoque multidisciplinar, pero hoy en día su estudio está en constante evolución y ha dado lugar a importantes eventos1 donde se reúnen visionarios en la temática, que buscan impulsar esta tecnología, acercándonos cada vez más a un mundo donde la inteligencia artificial y los seres humanos se entiendan y colaboren transformando nuestro futuro cercano.
Es importante comprender que esta disciplina de la interacción humano robot no es una tarea sencilla, sino tremendamente desafiante, ya que requiere a su vez de la contribución de las ciencias cognitivas, la lingüística, la psicología, la ingeniería, las matemáticas, la informática y el diseño de los factores humanos, por lo que existen múltiples atributos involucrados, como son:
Nivel de autonomía: toma de decisiones de forma independiente.
Intercambio de información: fluidez y entendimiento entre las diferentes partes.
Diferentes tecnologías y equipos: mayor adaptación entre lenguajes y modelos.
Configuración de tareas: definición y ejecución de tareas de manera eficiente.
Aprendizaje cognitivo: habilidades para aprender y mejorar con el tiempo.
También en este caso toma especial importancia el tipo de interacción, que se define como, acción, relación o influencia recíproca entre dos o más personas, objetos, agentes, etc. y un factor clave es la distancia entre humano y robot, donde se puede denominar interacción a distancia, por ejemplo, robots móviles que se envían al espacio, o por el contrario una interacción de manera física, cuando el ser humano tiene contacto con el robot.
Niveles de interacción entre humano y robot de acuerdo a los estándares definidos en ISO8373//10218//15066. Fuente: V. Villani, et al., Survey on human–robot collaboration in industrial settings: Safety, intuitive interfaces and applications, Mechatronics 55 (2018) 248–266,http://dx.doi.org/10.1016/j.mechatronics.2018.02.009
Estos atributos son solo una muestra de las complejidades que involucran estos sistemas de interacción robótica, donde la colaboración interdisciplinaria es esencial para su evolución.
Desafíos de la interacción entre humanos y robots
En este momento los desafíos están relacionados con la naturaleza altamente desestructurada de los escenarios donde se utilizan los robots colaborativos, ya que es imposible para un desarrollador tecnológico estructurar todo el entorno del sistema. Entre los más importantes retos se encuentran aspectos relacionados con movilidad, comunicaciones, construcciones de mapas y la conciencia de la situación.
Entonces, ¿cuál es el siguiente paso en las interacciones humanos-robots? Algunos desafíos son: conseguir que hablen el mismo idioma, esto implica mejoras y simplificación de la comunicación, especialmente en el caso de personas no entrenadas tecnológicamente, no presuponer estas habilidades previas y que no necesiten complicados manuales de instrucciones; también descubrir nuevas formas de interacción, mediante lenguaje natural, en el caso de los robots de asistencia, especial cuidado por la proximidad y vulnerabilidad; en general mejorar las interfaces, hacerlas más ágiles y flexibles, para poder ser adaptadas de forma sencilla a diferentes escenarios y cambios de entorno.
Por otro lado, un desafío que cobra especial importancia en los últimos tiempos es tener en cuenta las necesidades emocionales, valores humanos y ética en las interacciones entre humanos y robots, como se destacó anteriormente en esta definición de HRI.
Definición HRI (Interacción Humano-Robot)
es la ciencia que estudia el comportamiento y las actitudes de las personas hacia los robots en relación con sus características físicas, tecnológicas e interactivas, con el objetivo de desarrollar robots que faciliten el surgimiento de interacciones humano-robot eficientes (de acuerdo con los requisitos originales de su área prevista de uso), pero también sean aceptables para las personas y satisfagan las necesidades sociales y emocionales de sus usuarios individuales, respetando al mismo tiempo los valores humanos (Dautenhahn, 2013).
Inspirados por este apasionante campo de trabajo, CARTIF, en colaboración con la Fundación FIWARE y otros socios punteros en Europa, comenzará en 2024 el proyecto europeo ARISE, que pretende conseguir tecnologías de código abierto en tiempo real, ágiles y centradas en el ser humano, que impulsen soluciones en interacción Humano-Robot HRI combinando tecnologías abiertas como ROS2, Vulcanexus y FIWARE. Y donde se pretenden resolver retos mediante financiación de experimentos que desarrollen soluciones HRI ágiles con interfaces cada vez más adaptables e intuitivas.
ARISE abordará muchos de los siguientes desafíos: (1) Aplicación de robótica colaborativa para desmontaje de productos de valor añadido, (2) Picking de productos complejos en almacenes industriales, (3) Colaboración robótica flexible para un ensamblado y control de calidad más eficiente, (4) Reprogramación inteligente asegurando la adaptabilidad para diferentes productos mediante interfaces intuitivas, (5) Tareas de búsqueda y transporte en entornos sanitarios, (6) Mejora de la interacción multimodal en torno a diferentes tareas funcionales, (7) Asistencia robótica en tareas flexibles de alta precisión y (8) mejora de la ergonomía y la eficiencia de los trabajadores, generando así un marco de trabajo multidisciplinar que tiene en cuenta aspectos tanto tecnológicos como sociales.
Además, el proyecto ARISE abre sus puertas a los expertos en robótica para que puedan colaborar con la resolución de los diversos desafíos, generando así nuevos componentes tecnológicos para la HRI Toolbox, como ROS4HRI. Este gran reto colaborativo tiene como objetivo facilitar a las empresas la creación ágil y sostenible de aplicaciones HRI en un futuro cercano.
1ACM/IEEE International Conference on Human-Robot Interaction, IEEE International Conference on Robotics and Automation (ICRA) y Robotics Systems and sciences
Elicitar (del latín elicitus, «inducido» y elicere, «atrapar») es un término usado en psicología asociado al traspaso de información de forma fluida de un ser humano a otro por medio del lenguaje.
La elicitación del conocimiento aplicado en la industria es un proceso mediante el cual se recoge y registra información y conocimiento valioso de expertos o personas con experiencia en una determinada área en la organización. Es una técnica utilizada para identificar, extraer y documentar el conocimiento tácito (implícito) que se encuentra en la mente de los individuos o en los procesos organizacionales. Es una forma de recopilar y registrar el conocimiento existente y no disponible en la documentación formal, utilizado en diferentes ámbitos como la gestión del conocimiento, la ingeniería, o en el ámbito de negocios, entre otros. La elicitación de conocimiento puede usarse dentro del ámbito de la ingeniería para optimizar procesos industriales, crear sistemas expertos, para aplicaciones basadas en IA, etc.
Por ejemplo, si fuera tecnológicamente posible tener acceso a la mente de los trabajadores como plantean en la serie de ficción Severance (en español Separación) donde una siniestra corporación de biotecnología, Lumon Industries, utiliza un procedimiento médico de separación de recuerdos laborales de los no laborales, este conocimiento podría quedar registrado y disponible para ser utilizado, pero también está claro que esta premisa plantearía preocupaciones éticas y legales importantes en este momento de la historia, no sabemos en un futuro cercano.
El objetivo de la elicitación es obtener información precisa y relevante para ayudar en la toma de decisiones, mejorar la eficiencia y apoyar la capacitación y el desarrollo. Con esta información se elaboran unas reglas óptimas de actuación de los expertos que sirven de entrada principal para los controles que pueden ser programados en un proceso productivo.
La elicitación del conocimiento es importante por varias razones. En primer lugar (1), permite a las organizaciones documentar el conocimiento existente de los expertos en un área específica. Esto puede ayudar a evitar la re-invención de la rueda y mejorar la eficiencia en la toma de decisiones. En segundo lugar (2), la elicitación del conocimiento también puede ayudar a identificar las brechas en el conocimiento de una organización, lo que permite a las mismas tomar medidas de antemano. En tercer lugar (3), este proceso de elicitación puede ayudar a fomentar la colaboración y el intercambio de conocimientos entre los empleados de una organización.
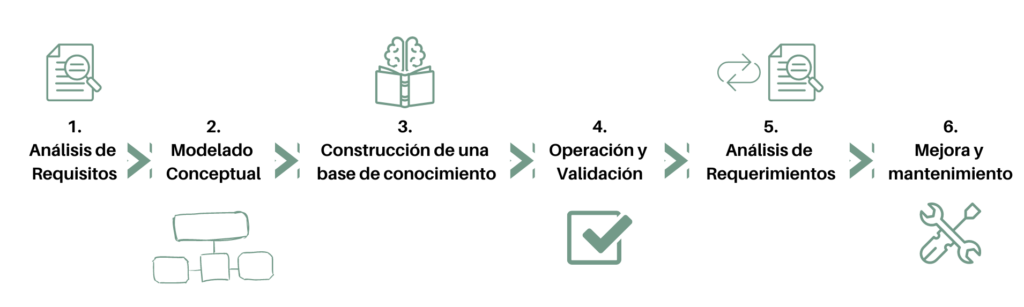
La metodología para elicitación del conocimiento requiere una serie de pasos a seguir:
Análisis de requisitos: identificar el enfoque de los sistemas basados en conocimiento.
Modelado conceptual: creación de una base de terminología utilizada, definición de interrelaciones y restricciones.
Construcción de una base de conocimiento: reglas, hechos, casos o restricciones.
Operación y validación: Operar usando mecanismos de razonamiento automatizado.
Regresar al análisis de requerimientos si es necesario o continuar en el proceso.
Mejora y mantenimiento: ampliando conocimiento el sistema evoluciona, repetir a lo largo de la vida del sistema.
Posteriormente, es necesario realizar un análisis del conocimiento recogido, determinar que información es relevante y cual no lo es tanto, para que el resultado sea conocimiento de alta calidad. Un punto crítico de la elicitación es la disponibilidad de los expertos en el dominio involucrado, su contribución debería estar disponible a través de todas las etapas del proceso para garantizar buenos resultados.
Para un desarrollo correcto del proceso de elicitación es necesario contar con los siguientes elementos:
Expertos
Los expertos en el proceso pueden tener diferentes puntos de vista de un mismo asunto, debido a su experiencia, conocimientos e incluso aspectos más subjetivos como mentalidad, manera de enfocar las dificultades, retos, etc. Se debe considerar expertos especialistas en diferentes etapas, en diferentes infraestructuras, equipos, productos, etc.
Las barreras que pueden aparecer en este tipo de intercambio de información es que suelen contener ideas complejas y asociaciones, difíciles de comunicar de una manera sencilla, con detalle y organización, el uso del mismo lenguaje, como conceptos o vocabulario específico.
Las herramientas para la elicitación del conocimiento ayudan a los usuarios o expertos, a documentar sus propias necesidades al operar los procesos productivos mediante entrevistas presenciales u online, reuniones en grupo, estudios in situ, etc.
Entrevistas
Para adquirir conocimiento experto la mejor técnica es llevar a cabo una serie de entrevistas personales. Algunos de los inconvenientes de llevarlas a cabo son: la distancia, el tiempo requerido y el personal necesario para involucrar en este proceso. Por lo que los cuestionarios en papel u online, pueden ser una opción válida, que ahorra tiempo y costes y se facilita que estén presentes en le cuestionario todas las secciones, facilitando la comparativa y la evaluación de los resultados.
Las características para un buen diseño del cuestionario implican: (1) determinar la información relevante, (2) una buena estructuración con diferentes secciones ordenadas por temáticas, (3) ordenar cuestiones de más general a más en detalle en cada sección, focalizando en la idea de esa sección, con ello se evita la introducción de sesgos, malentendidos o errores, (4) realizar el diseño con un experto de dominio para asegurar que las cuestiones son suficientemente comprensibles para facilitar la respuesta.
Resultados
Los resultados esperados son las acciones a realizar por los operadoresde las líneas cuando se producen desviaciones de los parámetros. Estas respuestas junto con la información recogida se transforman en reglas óptimas necesarias para programar controles automáticos sobre el proceso, y donde estas reglas son el elemento principal. La obtención de las reglas no es una tarea fácil, se recomienda un proceso iterativo y heurístico en varias fases. Para la validación es necesaria una comparativa de la información recogida en la base de datos con las respuestas de los operadores para verificar las acciones cuando se producen las desviaciones de los parámetros de los valores deseados.
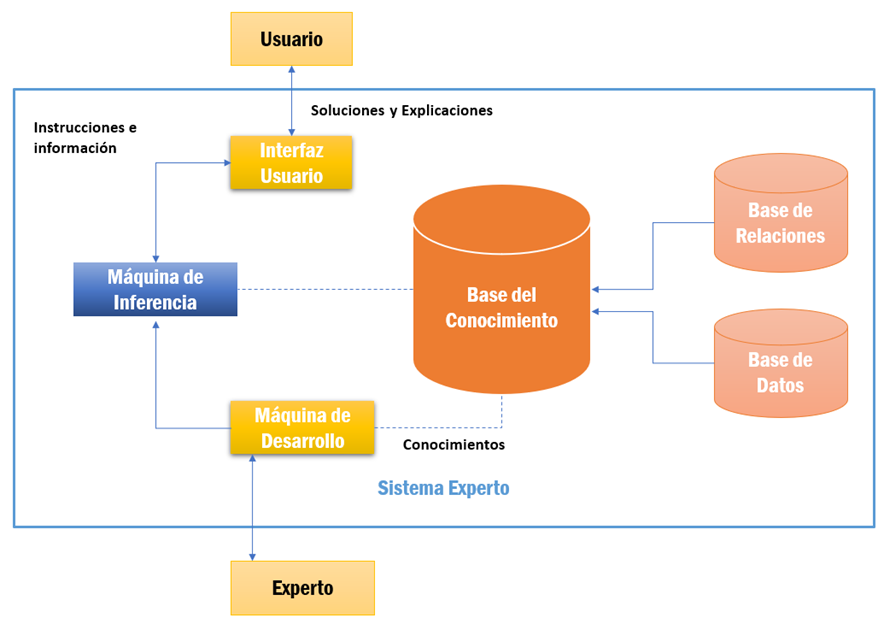
Se puede ver en la siguiente imagen de un sistema experto como estas reglas óptimas o también denominadas reglas if-then forman parte de la base de conocimiento, en concreto de la base de relaciones, que es la parte de un sistema experto que contiene el conocimiento sobre el dominio. En un primer paso, se obtiene el conocimiento del experto y posteriormente se codifica en la base de relaciones como reglas if-then.
Finalmente es cuando se puede utilizar lógica difusa o borrosa para el diseño e implementación de un sistema experto, es la lógica que utiliza expresiones que no son ni totalmente ciertas ni falsas, permite tratar información imprecisa como estatura media o temperatura baja, en términos de conjuntos denominados «borrosos» que se combinan en reglas para definir acciones: p.e. «si la temperatura es alta entonces enfriar mucho». Este tipo de lógica es necesaria si se quiere aproximar mejor a la forma de pensar de un experto, cuyo razonamiento no se basa en valores verdadero y falso típico de la lógica clásica, sino que requiere un manejo amplio de ambigüedades e incertidumbres propias de la psicología humana.
Actualmente en CARTIF la elicitación de conocimiento experto se está utilizando en el proyecto INTELIFER, cuyo principal objetivo es la optimización del proceso y los productos de una línea de fabricación de fertilizantes granulados NPK con apoyo de la inteligencia artificial.
La operación óptima de este tipo de plantas de fertilizantes granulados depende en un alto porcentaje de la habilidad de operadores expertos, pero que, a pesar de sus destrezas y habilidades, no pueden evitar las altas tasas de reciclo, frecuentes inestabilidades y paradas no deseadas, debido principalmente a la naturaleza extremadamente compleja del proceso de granulación siendo un proceso no lineal, acoplado, estocástico, multietapa, multiproducto, multivariable,etc. Por lo que la situación anteriormente expuesta ha supuesto la base científica para la definición del presente proyecto, siendo necesario el desarrollo de actividades de I+D en las cuales, mediante la aplicación de la filosofía de la inteligencia artificial junto con un mayor grado de sensorización y digitalización, se consiga optimizar este tipo de procesos de fabricación.