Innovar no es solo tener una buena idea. Es pelear por ella cuando nadie más lo hace. Es darle forma cuando aún es intangible, es fallar cien veces hasta que, de repente, algo empieza a brillar.
Tendemos a pensar cuando hablamos de innovación, que gracias a la aparición de una idea genial hemos resuelto ese pequeño objetivo o problema o, en otras ocasiones, un gran problema que puede transformar el mundo. Lo cierto es que ninguna idea genial va muy lejos si no es por personas que, con gran esfuerzo y perseverancia, consiguen «materializar» esa idea genial.
Las innovaciones pueden surgir en cualquier rincón de una organización. A menudo, los niveles directivos tienen más facilidad para convertir una intuición en una línea de trabajo, pero también es común que una buena idea emerja desde el equipo técnico, producción, calidad o incluso administración. El verdadero reto es lograr que esa idea sobreviva a todos los obstáculos que implica convertirse en realidad. Y son muchos los obstáculos, desde los compañeros más cercanos, directivos que no apoyan la idea porque es más cómodo seguir en la zona de confort, hasta obtener financiación interna o externa. Es decir, el reto de innovar en muchas ocasiones es sobrevivir al esfuerzo de pasar de idea a realidad patente.
«El reto de innovar en muchas ocasiones es sobrevivir al esfuerzo de pasar de idea a realidad patente».
La historia está llena de ideas brillantes que murieron por falta de perseverancia. Pero también de proyectos que nacieron, no porque fueron evidentes o perfectos, sino porque alguien insistió más allá de lo razonable. En contadas ocasiones estas ideas y personas que las impulsan cambian el mundo que conocemos (innovaciones disruptivas1).
Para plasmar con hechos reales cómo las ideas geniales cambian el mundo, hablemos de una de las historias más impactantes sobre innovación, el premio Nobel de Física en 2014 concedido a Isamu Akasaki, Hiroshi Amano y Shuji Nakamura porla invención del LED AZUL. Ese pequeño invento que hace que a día de hoy tengamos finas pantallas LED, y gracias a eso me leas desde tu portátil, móvil o tablet (hay decenas de aplicaciones más gracias a este invento).
Fuente: La Vanguardia. https://www.lavanguardia.com/ciencia/20141007/54416831597/nobel-fisica-2014-akasaki-amano-nakamura.html
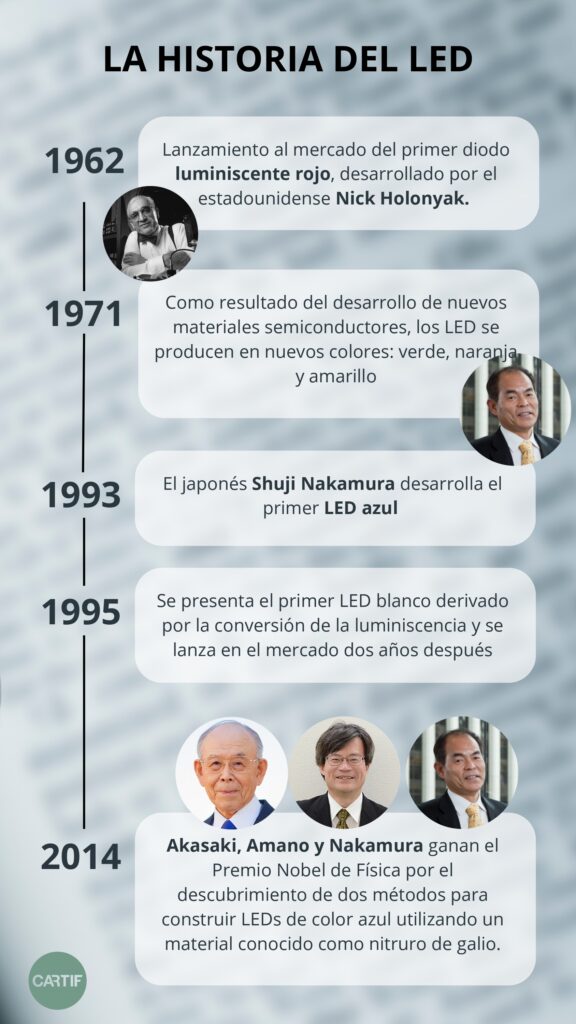
La historia del LED AZUL
Durante décadas, se lograron LEDs rojos, verdes y amarillos. Pero no azules. Y sin el azul, no se podía crear luz blanca eficiente, ni pantallas LED, ni proyectores de bajo consumo. Las principales empresas y centros de investigación del mundo lo intentaron y fracasaron. Era, simplemente, demasiado difícil.
El reto estaba en el material base. El nitruro de galio (GaN) era la mejor opción, pero era muy complejo de sintetizar y dopar. Los cristales eran defectuosos. La emisión de luz era inestable. Muchos lo intentaron y todos se rindieron.
Todos, excepto tres personas: Isamu Akasaki, Hiroshi Amano y Shuji Nakamura.
Akasaki y Amano, desde la Universidad de Nagoya, comenzaron a experimentar en los años 80.
Nakamura, un ingeniero en una pequeña empresa japonesa llamada Nichia Corporation, continuó sus investigaciones de forma casi autodidacta, contra la opinión de su entorno.
Durante años trabajaron con escasos recursos, sin visibilidad, sufriendo fracasos constantes y rechazo por parte de la comunidad científica. Pero persistieron.
En 1993, Nakamura logró finalmente desarrollar el primer LED azul de alta eficiencia y uso comercial. Aquella luz azul no solo cambió la iluminación, sino que abrió paso a nuevas tecnologías sostenibles, más duraderas y eficientes. En 2014, los tres recibieron el Premio Nobel de Física por una innovación que tardó 30 años en ver la luz… literalmente.
Os animaría a releer la historia de esta invención más en detalle, porque realmente es un gran ejemplo de cómo la perseverancia y esfuerzo pueden literalmente cambiar el mundo para mejor. Además, podemos aprender valiosas lecciones de esta historia:
La mayoría de las empresas abandonan una idea si no hay resultados en 6 meses. El LED azul tardó más de una década en funcionar, y décadas en ser reconocido.
Entender la innovación como maratón, no como un sprint.
La verdadera innovación requiere más de esfuerzo que de genialidad.
Hay que sostener la innovación, incluso cuando no hay resultados.
» En las organizaciones deberíamos valorar más a quienes insisten con rigor y convicción. No todas las ideas van a cambiar el mundopero, muchas que lo harían, nunca lo logran porque nadie lucha lo suficiente por ellas. Como el LED azul, quizás la próxima gran innovación de tu empresa no esté en la idea más visible, sino en esa persona que sigue creyendo en ella, incluso cuando todo falla.»
Porque al final, innovar no es solo tener razón, es tener la determinación de demostrarla cuando aún nadie la ve.
1. Innovaciones disruptivas
Un proceso mediante el cual se introducen productos, servicios o modelos de negocio que transforman radicalmente un mercado existente, creando nuevas formas de satisfacer necesidades o incluso creando mercados completamente nuevos
¿Alguna vez has probado algún juego de carreras de coches? Una carrera de F1, un rally, o si has conducido el Assestto Corsa, ya sabes por dónde encamino esta pequeña reflexión.
Si lo has hecho, alguna vez, habrás experimentado una sensación de «realismo» de comportamiento. De hecho, si has probado algún simulador de conducción, habrás notado el grado de detalle y realismo que hay en el comportamiento de la simulación, pudiendo recrear a la perfección, desde diferentes potencias y entregas de potencia de motor, repartos de pesos y dinámicas de los vehículos. Incluso es capaz de recrear el tipo de superficie por la que circula el coche, lo que implica diferencias de comportamiento, como es lógico debido a irregularidades y diferentes factores de rozamiento, etc. Podríamos hablar de gemelos digitales, representaciones digitales fidedignas a la realidad y que se comportan imitando el caso real en el mundo físico.
Tal es el grado de fidelidad a la realidad, que los equipos que más dinero gastan en el mundo para entrenar a sus pilotos, los equipos de F1, entrenan en simuladores virtuales (mixtos en realidad, pues el simulador es capaz de transmitir dinámicas al piloto).
Lo mismo podríamos decir de los pilotos de avión, que se entrenan durante cientos de horas en simuladores que representan, con un grandísimo grado de detalle, las dinámicas asociadas al vuelo de un avión.
Figura 1. Imagen de un simulador de F1. Fuente: Fbrand.
En la industria, también se realizan estos entornos virtuales que representan fábricas y sus procesos internos, llamados gemelos digitales, a un nivel de detalle cada vez más preciso. Y cada vez son más las empresas, tanto por el lado del cliente como por el lado de la empresa proveedora de automatizaciones, que implantan tanto la automatización de una instalación o proceso, como simultáneamente el gemelo digital. Esto es debido a los beneficios que se puede obtener al disponer de estas herramientas, por ejemplo, una mejor toma de decisiones gracias a la posibilidad de simulación previa, flexibilidad y rapidez a la hora de implantar cambios, mayor información en tiempo real, mejoras en mantenimiento.
Si entrenamos a personas en simuladores y simulamos procesos y fábricas, ¿no podemos hacer lo mismo con los robots? Pues efectivamente, creo que si.
Si te has relacionado en algún momento con la ingeniería en general, o con procesos de fabricación, sabrás que actualmente, el diseño de un producto (servicio, edificio, carretera…), se hace mediante el uso de softwares de diseño específico, llámese Autodesk, Blender o como sea, pero se hace digitalmente.
Piense en algo que conoce perfectamente, un coche. Pues todas y cada una de sus miles de piezas, sean piezas propias o suministradas por proveedores, están correctamente dimensionadas (geotérmicamente) y definidas (propiedades, composición, materiales …) digitalmente, tanto en 2D como 3D. Si integras toda la información individual en el concepto «coche», tendrías ahí, el famoso gemelo digital.
Ahora, extrapolado a un fabricante de robots (en este artículo, nos referimos a los robots de servicio, no a industriales), obviamente aunque no es una industria tan grande (a día de hoy) y con tanto bagaje como la automotriz, los procesos de diseño y fabricación en la industria en general son muy similares (en industrias más incipentes y modernas, también se integran las nuevas corrientes más rápido, primordialmente por el tamaño y la cultura), podemos intuir que estas empresas pueden disponer o disponen de un gemelo digital de su producto final. Con todos los aspectos positivos que ello conlleva a la empresa.
Figura 2. Sala virtual para monitorización de robots asistenciales.
Bien, llegados aquí, te preguntarás, ¿qué tiene que ver esto con que Carlos Sainz se entrene en un simulador? La respuesta es obvia, al igual que entrenamos a personas para mejorar sus capacidades ayudados por entornos virtuales, vamos a ser capaces de entrenar a robots en dichos entornos, con las grandes ventajas que esto conlleva. Verá rápidamente a que me refiero.
Para entrenar a estos robots, una de las técnicas que se utilizan, es mediante el uso de la IA, poniendo el robot en un entorno físico y probando a ejecutar las tareas necesarias para conseguir el objetivo para el que ha sido programado, y mediante el aprendizaje profundo, este robot va aprendiendo a realizar su misión cada vez mejor. Por ejemplo: REINO UNIDO | Presentan robot que «aprende por sí solo»
Ahora, no pienses en un simple brazo robótico que se dedica a realizar tareas simples, e imagina robots más «futuristas», como en la siguiente ilustración (es un robot comercial a día de hoy).
Figura 3. Robot de Boston Dynamics
Si disponemos del gemelo digital (lo más realista y totalmente definido) del robot, y podemos recrear entornos virtuales que recreen fielmente entornos físicos, como una ciudad, un bosque o la luna si usted quiere. Podremos entrenar a nuestro robot en tareas y entornos que no se podrían hacer de otra manera ( o sería más caro, peligroso o directamente imposible).
Un par de ejemplos, un poco extremos, para que se entienda bien: podemos recrear una zona azotada por una catástrofe natural y entrenar a estos robots en tareas de salvamento. O podemos recrear Marte con su atmósfera, temperaturas, gravedad, terreno, etc., y ver como se comportaría el robot en dicho entorno.
Una vez tuviéramos el modelo completamente entrenado y satisfaga las necesidades, se podría descargar el modelo de control del robot, en el modelo físico. Pudiendo estar entrenando como hemos visto para sucesos que no han sucedido todavía. De esta manera, se pueden detectar fallos de construcción, de materiales o de diseño y arreglarlo en el modelo digital, para comprobar la efectividad de la solución y posteriormente mejora el proceso productivo.
Por parte de la empresa fabricante, está claro la ventaja que conlleva el gemelo digital y estos entornos de entrenamiento. Flexibilidad, ahorro de costes, de tiempo, de riesgos, mayor capacidad de entrenamiento, mayor personalización de la solución para el cliente final, etc.
Y por otro lado para el usuario final, sería muy bueno, poder entrenar a los robots en las tareas concretas, antes de tener que realizarlas, posibilidad de entrenamiento sobre nuevas políticas, mayor grado de personalización, mejor entrenamiento entre agentes no esperados.
Considero, que esta forma de trabajar, podría ser un estándar en el futuro. Es posible que el día de mañana estemos entrenando mineros espaciales para recolectar minerales en asteroides. O que entrenemos al robot para el cultivo de algas en profundidad.
Quién sabe qué apasionantes misiones mandaremos hacer a robots pre-entrenados en un futuro, no tan lejano.
El mundo actualmente está inmerso en un profundo cambio de transformación digital, lo queramos o no. Además, parece el orden lógico de la evolución humana, ya que el desarrollo del ser humano, va ligado al desarrollo tecnológico, desde el «descubrimiento» del fuego, o las primeras herramientas rudimentarias, hasta la aparición de Internet o la exploración espacial. Este proceso de cambio, o mejor dicho revolución, no solo atañe a las personas, sino que también implica a las empresas, que están plenamente inmersas en esta revolución desde hace años: la 4º revolución industrial.
«Estamos al borde de una revolución tecnológica que modificará fundamentalmente la forma en que vivimos, trabajamos y nos relacionamos. En su escala, alcance y complejidad, la transformación será distinta a cualquier cosa que el género humano haya experimentado antes»
– Klaus Schwab, autor de «La cuarta revolución industrial» –
Dentro de esta revolución hay distintos aspectos clave, siendo uno de ellos la transformación digital. Un concepto que muchas personas asocian con digitalización, una parte fundamental de la transformación digital, pero que no recoge esta nueva realidad más amplia y compleja.
En muchas ocasiones este término se asocia a la integración de herramientas digitales como por ejemplo un CRM(Customer Relationship Management) para la gestión de clientes, un ERP (Enterprise Resource Planning) de gestión de la producción, etc. Pero en realidad, es un concepto mucho más amplio, que se puede definir como un proceso que consiste en orientar las actividades empresariales hacia la aplicación de las tecnologías emergentes, y para ello hay que pasar por un proceso de cambio cultural, organizativo y, por último, por la aplicación de las nuevas tecnologías a toda la organización.
Por lo tanto, podríamos diferenciar el concepto de digitalización (implantar herramientas digitales en ciertos procesos) del detransformación digital, siendo este último mucho más amplio, ya que orienta a la compañía hacia la implementación de nuevas tecnologías y hacia un cambio en el modo de trabajo tradicional. Teniendo todo esto en cuenta, podemos definir la Transformación Digital como el conjunto de proyectos y tareas que permiten adaptarse a las nuevas necesidades surgidas de la 4º revolución industrial. Tareas que deben orquestarse a través de un plan que englobe los siguientes aspectos:
Cambio hacia una cultura digital.
Plan de formación global.
Plan de reorganización organizativa.
Plan de formación específico.
Incorporación de nuevos perfiles.
Plan tecnológico progresivo.
Gracias a la transformación digital las empresas consiguen grandes ventajas probadas a la hora de mejorar en una serie de aspectos empresariales clave:
Genera nuevas experiencias para el cliente.
Mejora le eficiencia operativa.
Genera nuevas fuentes de ingresos.
Incrementa la capacidad de respuesta rápida ante los cambios en el mercado.
Crea una ventaja competitiva para la organización.
Mejora la colaboración interna.
Profundiza el análisis de datos (Big Data).
Una de las grandes revoluciones de esta transformación digital es el Big Data y la inteligencia artificial. Hay que tener en cuenta que en los últimos años, prácticamente se ha duplicado la cantidad de información que hay disponible en Internet cada dos años, y esta tendencia continuará en ascenso. Gracias a esta cantidad de información y las nuevas tecnologías como la inteligencia artificial, el machine learning, Deep Learning, etc. el mundo actual que conocemos va a cambiar, como también lo harán la forma de trabajar, de comprar y de relacionarnos.
Esta nueva realidad, que se ha hecho mucho más evidente a raíz de la pandemia de 2020, nos ha enseñado que las empresas que no consigan hacer frente a los rápidos cambios que se producen en la actualidad están condenadas a desaparecer, al igual que lo hicieron las especies que no se adaptaron al deshielo de la última glaciación.
En la actualidad, la transformación digital no es una opción. Hoy en día las empresas ya no pueden plantearse la adaptación a este nuevo panorama, pues no hay otra manera de renovarse e incrementar la competitividad que mediante la elaboración de un plan de transformación digital.
¿Cómo te ayudamos desde CARTIF?
Desde CARTIF nos hemos volcado en esta tarea de ayudar a las empresas, principalmente a las pequeñas, que son las que más dificultades encuentran en este complejo y cambiante mundo de la transformación digital. Porque sabemos de primera mano, que a veces la falta de tiempo o el desconocimiento, hacen que no avancemos en estos procesos tan fundamentales. Es por ello que contamos con un plan para ayudarte en este camino. Disponemos de unservicio de asesoramiento en Transformación Digital totalmente gratuito para las empresas.
¿En qué consiste este programa?
Tras contactar con nosotros para recibir información, te enviaremos un formulario de solicitud del servicio, y una vez remitido:
Realizaremos una visita o reunión con la persona responsable en la empresa para poder llevar a cabo un diagnóstico de la situación actual, metodología de trabajo y herramientas digitales utilizadas.
En función de este informe, crearemos un plan de acción personalizado con las distintas acciones que se identifiquen para mejorar la competitividad de la empresa.
Por último, llevaremos a cabo un periodo de tutorización para acompañar a la empresa durante el proceso.
Estas acciones permitirán a tu empresa iniciar o continuar el proceso de transformación digital generando una hoja de ruta para poder abordarlo.